商机详情 -
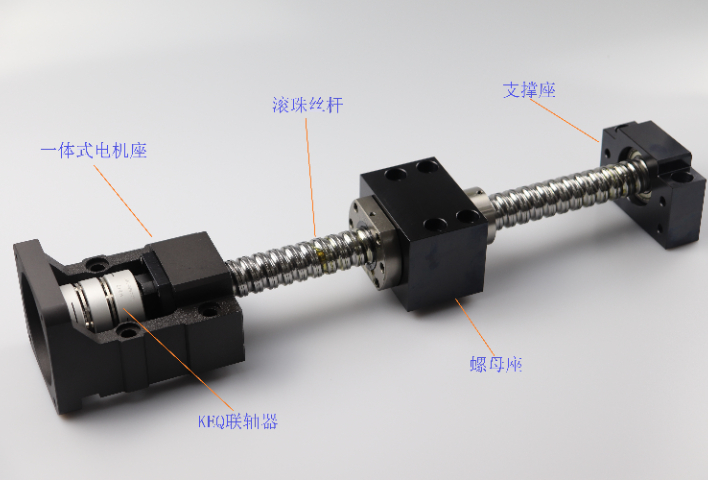
苏州丝杠KK模组机械结构
随着社会的发展,人们对安全的需求越来越高。智能安防作为保障社会安全的重要手段,正不断发展和完善。[模组名称] 在智能安防领域有着广泛的应用。在视频监控系统中,[模组名称] 能够实现高清视频的实时采集、传输和存储。其强大的图像识别能力可以对监控画面中的人员、车辆等进行智能分析,及时发现异常情况,并发出警报。例如,在机场、火车站等人员密集场所,通过安装基于 [模组名称] 的智能监控设备,可以快速识别出可疑人员,提高安防工作的效率和准确性。在入侵检测系统中,[模组名称] 可以与各类传感器配合使用,实时监测周边环境的变化。一旦发现有非法入侵行为,系统能够立即发出警报,并将相关信息传输至安保人员的手机或监控中心,确保及时采取应对措施。这种智能化的安防系统,**提高了社会的安全防范水平,为人们的生活和工作提供了更加可靠的保障。线性模组在 3C 电子行业用于屏幕贴合,定位精度达 0.01mm 级,保障产品良率。苏州丝杠KK模组机械结构
驱动系统为线性模组提供精细的动力输入,主要包括电机与驱动控制器:电机类型:主流采用伺服电机(如松下 A6 系列、西门子 V90 系列)或步进电机(如雷赛 DM 系列),伺服电机通过编码器实现位置闭环控制,定位精度更高(可达 ±0.001mm),步进电机成本较低,适合精度要求不高的场景;减速机构:部分重载模组需配备行星减速器,降低电机输出转速、提升扭矩,减速器精度等级需与模组精度匹配,背隙通常控制在 1-3 弧分;驱动控制器:根据电机类型配置相应的驱动器,伺服驱动器支持位置、速度、扭矩三种控制模式,可通过脉冲信号、模拟量或总线(如 EtherCAT、Profinet)实现与上位机的通信。无锡新能源KK模组通配上银导向系统多采用滚珠型线性滑轨,配合精度分 H、P、N 级,保障直线运动精度。

软件系统类模组:以代码形式存在,实现特定逻辑功能的程序单元,主要包括:嵌入式软件模组:面向嵌入式系统的功能模块,如 RIOT OS 的线程管理模组、网络协议模组等,具备资源占用低、实时性强的特点。应用程序模组:面向桌面与移动应用的功能组件,如插件、扩展程序等,典型**有浏览器插件、办公软件扩展模块。游戏模组:用于扩展游戏功能的代码包,通过修改游戏逻辑或增加内容实现个性化体验,Java 是其主流开发语言之一。按集成度分类基础型模组:*集成**功能单元,如*含基带与射频的通信模组、*含显示面板的基础显示模组,适用于对成本敏感的场景。集成型模组:集成多种关联功能,如含定位功能的通信模组、集成触控功能的显示模组、含数据存储的传感器模组,可减少终端产品的设计复杂度。智能型模组:集成计算与决策能力,如搭载边缘计算芯片的通信模组、含 AI 算法的图像识别模组,**模组技术的**发展方向。
丝杆传动模组:丝杆传动模组以滚珠丝杆或梯形丝杆为**传动部件,通过电机驱动丝杆旋转,将回转运动转化为螺母的直线运动。滚珠丝杆模组具有传动效率高(可达 90% - 98%)、定位精度高(±1 - 5μm)的特点,适用于精密加工、电子制造等对精度要求严格的场合;梯形丝杆模组则承载能力强,成本较低,但传动效率相对较低(30% - 40%),常用于重载、低速的工况,如重型机床的工作台驱动。同步带传动模组:同步带传动模组利用同步带与带轮之间的啮合传递动力,电机驱动带轮旋转,带动同步带及安装在其上的滑块做直线运动。该类型模组具有传动速度快(比较高可达 5m/s)、行程长、噪音低等优点,适用于高速搬运、分拣等对速度要求较高的场景,但定位精度相对丝杆模组较低(±0.05 - 0.1mm)。模组集成振动传感器,监测振动频率,提前预警故障,减少停机时间。

精密定位模组:精密定位模组以高精度为**特点,通常采用滚珠丝杆或直线电机传动,配合高精度直线导轨和伺服控制系统,定位精度可达微米级甚至纳米级。主要应用于半导体制造、光学仪器、医疗设备等对定位精度要求极高的领域,如光刻机的晶圆定位平台、CT 扫描仪的检查床驱动系统等。高速搬运模组:高速搬运模组注重运动速度和加速度性能,多采用同步带或直线电机传动,能够实现快速的物料搬运和分拣。在自动化物流仓储、电子组装生产线等场景中,高速搬运模组可大幅提高生产效率,如快递分拣中心的包裹搬运系统、SMT 贴片机的元件取放机构等。重载型模组:重载型模组主要用于承载较大重量的负载,通常采用大直径丝杆、重型导轨和**度结构设计,能够承受数吨甚至数十吨的载荷。在汽车制造、工程机械等行业,重载型模组用于驱动大型工作台、机械臂等部件,如汽车焊接生产线的大型工件搬运装置、重型机床的龙门架驱动系统等。单轴模组是基础传动单元,能实现单一方向直线运动,安装便捷,用于送料机构等。崇明区微型KK模组多少钱
滚珠丝杆线性模组摩擦系数低至 0.001-0.005,传动效率 90%-95%,适配对精度要求高的数控机床。苏州丝杠KK模组机械结构
(3)齿轮齿条传动原理齿轮齿条传动主要用于重载线性模组,其原理基于 “齿轮啮合传动” 的机械结构:动力输入:电机通过减速器与齿轮连接,电机旋转经减速器减速后带动齿轮转动;运动转换:齿轮与齿条啮合,齿轮旋转时,齿条沿啮合方向做直线运动;导向约束:齿条与模组滑块固定,滑块通过线性滑轨限制旋转自由度,确保直线运动精度;负载承载:齿轮齿条的啮合接触面积大,可承受较大的轴向与径向负载,适合重型设备应用。该传动方式的负载能力可达数吨,且通过多齿轮啮合设计可进一步提升传动刚性,但定位精度相对较低(通常为 ±0.1mm-±0.5mm),适合低速重载场景。苏州丝杠KK模组机械结构