商机详情 -
广州薄膜视觉检测系统哪里买
视觉检测点云是一种利用点云数据实现视觉检测的技术。点云数据是由三维坐标系中的无数个点组成的集,可以准确地表示物体在空间中的位置和形状。在视觉检测领域,点云数据可以用于物体识别、跟踪、测量等任务。例如,通过将点云数据输入到深度学习模型中进行训练和学习,可以实现对物体的高精度识别和分类。此外,点云数据还可以与其他技术相结合,如增强现实技术、虚拟现实技术等,实现更复杂、更精确的视觉检测任务。总之,视觉检测点云是一种高效、高精度的自动识别和检测技术,可以广阔应用于工业自动化、质量控制、安全监控、医疗诊断、交通监控等领域。随着技术的不断进步和应用需求的不断扩大,视觉检测点云还将继续得到发展和完善。流水线防呆台标机视觉检测价格。广州薄膜视觉检测系统哪里买
视觉检测自动化和智能化技术的应用范围非常广阔,包括但不限于以下几个方面:工业自动化:在生产线上的产品质量检测、零件定位、装配等环节,视觉检测自动化和智能化技术可以提高生产效率和产品质量。质量控制:视觉检测自动化和智能化技术可以对产品的外观和质量进行高精度的检测和评估,及时发现缺陷和问题,保证产品的质量。安全监控:视觉检测自动化和智能化技术可以应用于安全监控领域,如人脸识别、行为分析等,提高安全监控的准确性和效率。医疗诊断:视觉检测自动化和智能化技术可以应用于医学图像的分析和处理,如X光片、MRI图像等,辅助医生进行诊断。交通监控:视觉检测自动化和智能化技术可以应用于交通监控领域,如车辆检测、交通拥堵分析等,提高交通管理的效率和准确性。无锡模具加工视觉检测厂家电话龙门动柱型离线铆钉视觉检测大概价格。

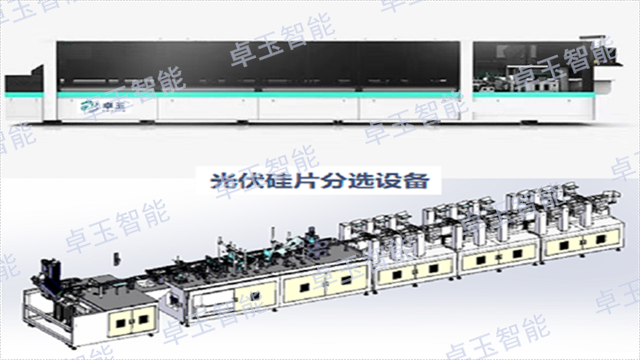
龙门动柱型离线铆钉检测机:保障产品质量的视觉利剑随着制造业的快速发展,对产品质量的要求也日益提高。铆钉作为连接和固定的重要部件,其质量直接关系到产品的整体性能和安全性。因此,对铆钉的精确检测成为了制造过程中不可或缺的一环。江苏卓玉智能科技有限公司,凭借其在视觉检测领域的深厚积累和不断创新,成功推出了龙门动柱型离线铆钉检测机,为制造业的质量控制提供了有力保障。龙门动柱型离线铆钉检测机,是一种专门针对铆钉进行高精度检测的智能化设备。它采用了**的机器视觉技术,结合精密的机械结构和运动控制系统,实现了对铆钉的、快速、准确检测。在检测过程中,龙门动柱型离线铆钉检测机能够自动识别铆钉的位置、尺寸、形状等关键参数,并通过图像处理算法对铆钉的外观和内部结构进行细致的分析。无论是铆钉的缺失、错位,还是尺寸偏差、表面缺陷,这款检测机都能迅速准确地识别出来,并通过友好的人机界面进行实时反馈。值得一提的是,龙门动柱型离线铆钉检测机采用了龙门式框架结构,使得设备的稳定性和精度得到了极大的提升。同时,动柱型设计使得检测头能够灵活移动,适应不同规格和形状的铆钉检测需求。这种设计不仅提高了检测效率,还降低了操作难度。
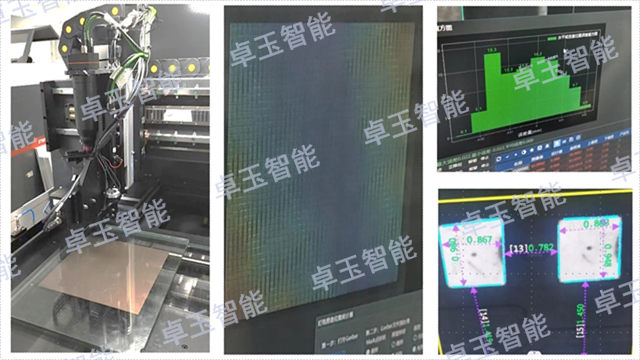
镜头组AOI检测机:提升镜头组装配质量的视觉利器随着科技的不断进步,视觉检测技术在工业制造领域的应用越来越。特别是在镜头制造行业,对镜头组装配质量的检测要求越来越高。为满足这一需求,江苏卓玉智能科技有限公司凭借其深厚的视觉检测技术积累和创新能力,成功推出了镜头组AOI(自动光学检测)检测机,为镜头制造行业带来了性的变革。镜头组作为光学设备中的部件,其装配质量直接影响到光学设备的成像效果和使用性能。因此,对镜头组进行精确、**的检测是确保产品质量的关键环节。传统的检测方式往往依赖于人工目视检查,这种方式不仅效率低下,而且容易受到人为因素的影响,导致漏检或误检的情况时有发生。而镜头组AOI检测机的出现,则彻底改变了这一局面。镜头组AOI检测机采用**的机器视觉技术,通过高精度相机和图像处理算法,实现对镜头组装配质量的检测。它能够自动识别镜头组中的装配缺陷、异物以及尺寸偏差等问题,并通过数据分析给出准确的检测结果。这种检测方式不仅提高了检测精度和效率,而且降低了人为因素的干扰,确保了检测结果的客观性和可靠性。在检测过程中,镜头组AOI检测机还能够对镜头组的各个部件进行精确的定位和测量。苏州视觉检测大概多少钱。
视觉检测算法的重要步骤通常包括以下几个方面:数据预处理:对待检测图像进行预处理,包括噪声去除、图像增强、图像分割等操作,以提取出与待检测物体相关的特征信息。特征提取:从预处理后的图像中提取出与待检测物体相关的特征,例如形状、边缘、纹理等。分类器设计:根据提取的特征训练分类器,实现对不同物体的分类和识别。常见的分类器包括支持向量机(SVM)、神经网络、决策树等。目标检测:通过使用计算机视觉领域的算法和技术,对图像进行处理和分析,从而实现对图像中目标物体的自动检测和定位。常见的目标检测算法包括基于区域的分割、基于特征的分割、基于模型的分割等。结果分析和输出:通过对图像进行目标检测之后,还需要对检测结果进行分析和评估,例如计算准确率、召回率、F1值等指标,并根据分析结果输出检测报告。晶圆后道2D测量视觉检测厂家供应。杭州在线冲压视觉检测机
圆柱电池外观缺陷视觉检测哪里有。广州薄膜视觉检测系统哪里买
视觉检测设备中常用的算法包括以下几种:滤波算法:用于对图像进行预处理,平滑图像以减少噪声,增强图像的对比度等。边缘检测算法:用于识别图像中的边缘和轮廓,提取出有用的特征信息。图像增强算法:用于突出图像中的重要特征,如边缘、色彩等,同时减少不重要特征的影响。特征提取算法:包括SIFT、SURF、ORB等算法,用于从图像中提取出关键点和特征描述子。目标检测算法:包括HaarCascades、HOG+SVM、FasterR-CNN等算法,用于检测图像中的目标物体。三维重建算法:包括立体视觉、结构光、TOF等算法,用于重建物体的三维模型。深度学习算法:包括卷积神经网络(CNN)、循环神经网络(RNN)和生成对抗网络(GAN)等算法,用于处理大规模和复杂的图像数据集。增强现实算法:包括视觉跟踪、投影变换、三维重建等算法,用于将虚拟物体与真实世界中的物体进行融合。广州薄膜视觉检测系统哪里买