标签列表 - 杭州星火博特科技有限公司
-
 济南双目3D相机模块
济南双目3D相机模块场景:矿山井下巷道,光线昏暗、粉尘多,存在矿车、轨道、碎石、管道等障碍物,地面崎岖不平、有积水,需在高危环境下自主巡检,避免碰撞设备与坠落风险。技术说明:搭载sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在昏暗、多粉尘环境下的局限,实现远距离矿车、管道的高精度探测与近距离碎石、积水的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建井下三维环境模型,优化系统延迟,应对矿车移动、碎石掉落等动态场景,智能适应昏暗光照、粉尘环境与地形起伏,保障机器人在井下全天候稳定运行,替代人工完成高危巡检任务。sparkbot的3D视觉定...
发布时间:2026.06.21 -
 重庆叉车3D相机打印
重庆叉车3D相机打印3D激光雷达为智能割草机器人提供“感知世界的眼睛”,其超宽视场角设计,不*可能清晰识别地面草坪边界,更能捕捉树梢、灌木丛等高空障碍物。高达20万点/秒的点云速率,可生成高密度实时3D地图,让机器人在大型公共绿地或复杂庭院中游刃有余。割草作业对边界控制要求极高,搭载的3D激光雷达具备≤2cm的测距精度,结合NetRTK校正后,全局定位误差可控制在1cm左右,确保机器人准确执行“Z”字形割草路径,避免漏割、重割或越界进入花坛。同时,激光雷达结合视觉与RTK互补,解决传统机器人在树下、墙角易迷失的问题,毫秒级响应避障,兼顾安全与效率。sparkbot的3D视觉定位解决方案,将激光雷达、dToF相机与...
-
 工业3D相机模块
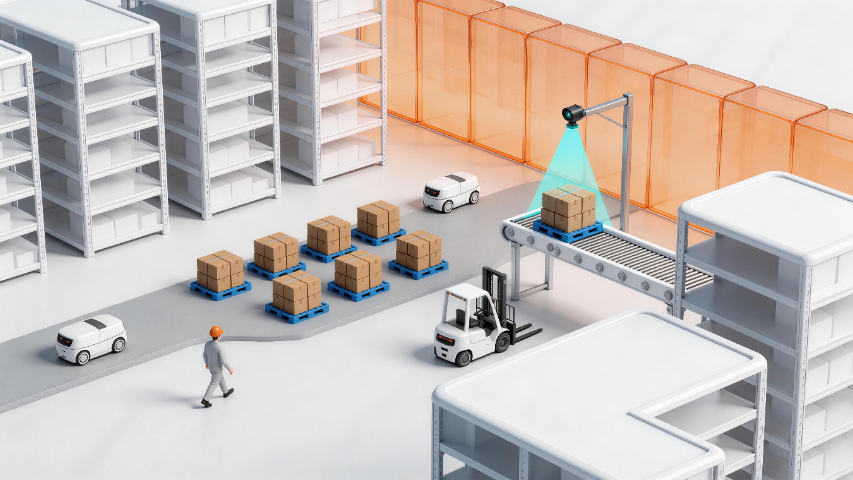
工业3D相机模块现代仓储管理系统集成了多种先进技术,以实现高效、自动化的仓储运营。这些系统包括物联网(IoT)传感器、大数据分析和人工智能(AI)、仓库执行系统(WES)、自动化存储和检索系统(AS/RS)、云计算和数据存储,以及安全和监控系统。通过这些技术的协同工作,仓库能够实现实时数据收集和分析,优化资源分配,减少人工干预,提高运营效率。在这些系统中,库位占用状态的判定准确性尤为重要,通过采用3D激光雷达或3D视觉技术,实时监测每个库位的被占据状态以及货物的堆高信息,使得移动机器人可以获取实时精细的数据支持,从而进行下一步准确的货物取放操作。sparkbot的3D tof相机、3D激光雷达系列产品。工业3...
-
 郑州割草机3D相机统计
郑州割草机3D相机统计3D激光雷达及其在测绘领域的主要应用 3D激光雷达(LiDAR)是通过发射激光脉冲、测量反射时间,获取目标位置、形状和速度的主动式遥感技术,凭借高精度、高分辨率、高效率的优势,在测绘领域极具应用前景。 地形测绘中,它可快速捕捉地表三维细节,生成高精度数字高程模型(DEM),为城市规划、道路设计、水利工程提供支撑。建筑物测量时,其非接触式测量方式,能规避传统方法的安全隐患与低效问题,可用于建筑重建、立面分析、安全评估,为城市规划、文物保护提供依据。此外,它能穿透树冠,获取林下地形与植被信息,助力森林资源调查,为生态保护提供科学参考。sparkbot团队的3D视觉相机模组助力智能割草机器人适用于家...
-
天津客流量3D相机厂家
果园采摘面临果实易被枝叶遮挡、定位准确度不足、易损伤果实等痛点,尤其柑橘等果树采摘环境更为复杂。sparkbot 3D TOF相机为采摘机器人搭载重要感知系统,选用DT950型号,120°超广视角可多方面捕捉果树轮廓,5米内≤1cm的测距精度的准确定位果实位置,dToF传感器与全局快门相机融合,快速区分果实与枝叶,避免误剪。通过雷视融合算法,自主规划采摘路径,配合柔性夹持装置,实现“识别—定位—采摘”一体化作业,成功识别率超96%,采摘力度准确可控,减少果实损伤,解决果园采摘工难请、效率低的行业难题,适配柑橘、苹果等多种果树场景。基于3D视觉传感器,sparkbot推出了人工叉车识别系统与库位...
-
 武汉机械狗3D相机雷达
武汉机械狗3D相机雷达3D激光雷达测绘技术的发展趋势及总结 3D激光雷达外形轻巧紧凑,探测距离与效率不断提升,支持三回波与双扫描模式,较广泛应用于电力、林业、移动测绘、智慧城市等场景,是测绘领域的高效测量工具。 其发展呈现三大趋势:一是高精度与高分辨率持续升级,适配复杂测绘场景;二是多源数据融合,与光学、雷达遥感深度结合,提升测绘结果可靠性;三是智能化自动化,依托人工智能实现自动识别、数据预处理等功能,提升效率与质量。随着技术进步,3D激光雷达将在测绘领域发挥更大作用,其发展趋势也将为该领域注入新活力。sparkbot的3D 视觉相机采用i tof原理设计。武汉机械狗3D相机雷达融合“三维+AI”与3D激光雷达新技...
-
苏州托盘3D相机避障
3D ToF无人机复杂环境安全保障场景说明 在茂密林地、城市楼宇峡谷、高压电力巡检等视觉受限场景中,无人机飞行易受遮挡、光线干扰,安全隐患突出,而3D ToF技术成为守护飞行安全的“智慧双眼”,准确构建安全飞行缓冲区。茂密林地中,枝叶交错遮挡视线,3D ToF通过发射红外光脉冲,捕捉光线往返时间差,快速生成实时3D深度地图,准确识别树干、灌丛位置,规避碰撞风险,构建贴合林地地形的缓冲区。城市楼宇峡谷内,高楼遮挡GPS信号,光线明暗不均,3D ToF无需复杂算法,高效提取距离信息,实时感知楼宇间距、墙体轮廓,避免无人机在楼宇间漂移、碰撞,保障低空飞行安全。高压电力巡检场景中,导线、杆塔遮挡视线,...
-
 深圳货架3D相机定位
深圳货架3D相机定位3D ToF(飞行时间)技术作为数字孪生的重要感知支撑,凭借高精度3D建模、实时数据采集优势,在智慧工业、自动驾驶测试等领域深度赋能,解决数字孪生虚实同步难题,推动技术落地见效。 智慧工业领域,3D ToF为数字孪生提供准确数据底座。其通过发射光信号并测量往返时间获取深度信息,快速采集生产设备、生产线的三维数据,实现物理场景1:1数字化复刻,助力软通动力、GE等企业构建动态孪生模型。该技术可实时捕捉设备运行姿态与损耗细节,同步反馈至虚拟模型,支撑设备故障预判与生产流程优化,大幅提升生产效率和设备可靠性,同时降低传统建模的时间与成本。 自动驾驶测试中,3D ToF强化数字孪生仿真真实性。Waym...
-
 青岛割草机3D相机定位
青岛割草机3D相机定位传统园林修剪依赖人工登高作业,效率低且安全隐患大,绿篱造型修剪还存在标准化难、误差大的问题。sparkbot 3D TOF相机为枝叶修剪机器人提供重要感知支持,可选用DT950pro型号,其40米测距SPAD纯固态激光雷达与1080P视觉模块,实现枝叶轮廓准确扫描与三维建模,硬件级同步算法确保动态遮挡下定位误差<5cm,准确识别电力线、交通标识等障碍物。搭配多机械臂协同控制,可自动规划修剪路径,适配胸径≤30cm乔木,修剪精度达±2cm,1台设备可替代5名工人,效率提升400%,同时规避高空作业风险,助力市政绿化、景区运维实现“无人化”修剪。sparkbot的3D 视觉相机采用i tof原理设...
-
 天津移动机器人3D相机建图
天津移动机器人3D相机建图火灾现场复盘勘查领域已进入科技化复盘阶段,其勘查方案集成3D激光雷达扫描、3D ToF技术、AI痕迹分析与数字化存档技术,实现“现场扫描-三维复刻-痕迹提取-复盘分析”的闭环流程。勘查人员使用便携式3D激光雷达ToF扫描仪,在火灾现场冷却后进行多维度扫描,依托ToF技术的抗干扰优势,可穿透烟尘残留,5-8分钟完成现场数据采集,同步获取高精度点云与实景影像,准确还原火灾现场原貌、建筑损毁情况及火势蔓延痕迹。系统通过AI智能分析,提取火灾蔓延轨迹、起火点等关键信息,生成标准化复盘报告,支持三维模型推演与痕迹标注,形成完整数字化复盘档案,为火灾原因认定、责任划分提供准确数据支撑,提升火灾复盘的科学性...
-
青岛视觉3D相机雷达
地质灾害隐患排查领域已实现科技化升级,其排查方案集成3D激光雷达扫描、3D ToF技术、无人机航拍与AI风险研判技术,实现“全域采集-准确建模-隐患识别-预警管控”的闭环管理。工作人员操控搭载3D激光雷达ToF扫描仪的无人机,对高陡山体、滑坡隐患点等人员难至区域进行全覆盖扫描,借助ToF技术的植被穿透能力,穿透茂密植被采集地表高精度点云数据,约1小时可完成10平方公里区域排查。系统自动生成三维地形模型,通过AI比对分析,准确识别山体裂缝、滑坡迹象等隐患,标注隐患位置与风险等级,支持多视角沉浸式查看,形成完整数字化排查档案,为地质灾害预警与防治提供准确数据支撑,提升隐患排查的效率与多方面性。3D...
-
 西安客流量3D相机检测
西安客流量3D相机检测场景:城市街道、公园,存在行人、非机动车、垃圾桶、井盖、绿化带等障碍物,面临强光、阴天、雨天等天气,地面有积水、落叶、杂物,需自主清扫且避让行人和设施。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,实现远距离行人、非机动车的高精度探测与近距离垃圾桶、井盖、落叶的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建城市街道三维环境模型,优化系统延迟,应对行人横穿、非机动车变道等动态场景,智能适应室外光照变化、雨天积水与地面起伏,保障环卫机器人全天候稳定作业,避免碰撞行人和市政设施。杭州星火博特3D视觉相机提供高性价比的感知...
-
沈阳结构光3D相机导航
场景:港口码头,存在集装箱、起重机、运输车辆、码头工人等障碍物,地面粗糙、有坡度,面临强光、海风、雨天等复杂环境,需高效搬运集装箱且避免碰撞大型设备。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,采用相机融合技术,结合3D ToF与dToF数据,实现远距离集装箱、起重机的高精度探测与近距离运输车辆、工人的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面坡度及可通行区域,构建港口三维环境模型,深度优化系统延迟,应对运输车辆移动、集装箱堆放偏差等动态场景,智能适应室外强光、海风与粗糙地面,保障搬运机器人在港口全天候稳定作业,提升搬运效率。sparkbot团队的3D视觉相机模...
-
 重庆双目3D相机打印
重庆双目3D相机打印地质灾害隐患排查领域已实现科技化升级,其排查方案集成3D激光雷达扫描、3D ToF技术、无人机航拍与AI风险研判技术,实现“全域采集-准确建模-隐患识别-预警管控”的闭环管理。工作人员操控搭载3D激光雷达ToF扫描仪的无人机,对高陡山体、滑坡隐患点等人员难至区域进行全覆盖扫描,借助ToF技术的植被穿透能力,穿透茂密植被采集地表高精度点云数据,约1小时可完成10平方公里区域排查。系统自动生成三维地形模型,通过AI比对分析,准确识别山体裂缝、滑坡迹象等隐患,标注隐患位置与风险等级,支持多视角沉浸式查看,形成完整数字化排查档案,为地质灾害预警与防治提供准确数据支撑,提升隐患排查的效率与多方面性。sp...
-
重庆双目3D相机厂家
感知硬件的迭代为移动警务机器人、自动勘查设备等提供了更强大的“视觉”支撑。3D激光雷达,以其360°水平视场角与大角度无盲区的垂直视场角构成的超大立体感知范围,打破了传统机械式雷达或单线雷达的局限。其10厘米近距盲区、主动抗信号串扰及强光环境下稳定探测的特性,使其能适应从室内复杂环境到室外开阔现场的多变场景。这款轻巧易集成的雷达,能为移动警务装备提供更丰富、更可靠的三维空间数据,明显增强其在自主导航、障碍物精细识别、复杂环境建图与安全避障等方面的能力,为现场勘查的自动化、智能化辅助提供了关键硬件基础。这两大技术趋势的汇聚,标志着公共安全正从单点工具升级走向系统性、集成化的“感知-重建-分析”智...
-
 沈阳双目3D相机避障
沈阳双目3D相机避障在施工现场进度监控中,构建完整的3D数字孪生模型是突破传统监控方式局限的关键,可有效弥补传统地面激光扫描与摄影测量技术需大量扫描作业的不足,提升监控效率与准确度。传统技术依赖密集扫描获取现场数据,不*可耗时费力,还易因扫描盲区导致数据不完整,影响进度分析的准确性。 3D ToF相机传感器凭借其高效的数据采集能力,成为数字孪生模型构建的重要支撑。其获取的3D数据可通过两种关键方式,实现与其他传感器数据的准确对齐和集成:一是借助机器可读标记检测,快速定位各传感器数据的空间位置;二是通过匹配每个传感器所获图像的特征点,进行额外的重新定位校准,确保多源数据在数字孪生模型中实现无缝融合。 整合后的多源数...
-
杭州客流量3D相机识别
在机器人仓储库位管理场景使用过程中存在以下问题:AGV与人工在同一仓库中进行货物堆放,造成WMS系统更新不及时目前在大多数已经应用了AGV的仓库中,依然会存在人工堆放物品的情况,这种情况会造成WMS系统无法实时判断每个库位的实际占用情况,从而导致WMS给到AGV的信息不准确,已经被占据的库位如果不能及时被识别出来,会造成AGV收到的指令错误,不*可降低运行效率,且容易碰撞其他货物或设备,严重的情况下,可能引发安全事故,危及人员安全和设备运行。通过采用3D激光雷达或3D视觉相机技术,在则可以弥补以上弊端。sparkbot采用3D激光雷达或3D视觉相机技术并搭载从底层开发的智能库位管理系统完美解决...
-
AMR3D相机厂家
地质灾害隐患排查领域已实现科技化升级,其排查方案集成3D激光雷达扫描、3D ToF技术、无人机航拍与AI风险研判技术,实现“全域采集-准确建模-隐患识别-预警管控”的闭环管理。工作人员操控搭载3D激光雷达ToF扫描仪的无人机,对高陡山体、滑坡隐患点等人员难至区域进行全覆盖扫描,借助ToF技术的植被穿透能力,穿透茂密植被采集地表高精度点云数据,约1小时可完成10平方公里区域排查。系统自动生成三维地形模型,通过AI比对分析,准确识别山体裂缝、滑坡迹象等隐患,标注隐患位置与风险等级,支持多视角沉浸式查看,形成完整数字化排查档案,为地质灾害预警与防治提供准确数据支撑,提升隐患排查的效率与多方面性。sp...
-
 济南割草机3D相机避障
济南割草机3D相机避障3D 视觉技术在无人叉车与货运机器人上的应用前景广阔,重要围绕技术升级、场景拓展与成本优化三大方向,成为推动物流与工业自动化升级的重要动力。 技术层面,将向高精度、低成本、多技术融合演进,ToF 与结构光等技术融合提升感知精度,搭配 AI 算法实现自主学习与动态路径规划,同时替代高价激光雷达,降低硬件成本,推动中小型企业普及。 场景层面,应用将更具柔性与多方面性:无人叉车可实现高位货架准确叉取、冷链低温环境作业,货运机器人能适配动态仓储、跨车间转运等复杂场景,还可与仓储管理系统联动,实现多设备协同作业,覆盖更多行业需求。 产业价值层面,将持续助力企业降本增效,减少人工干预,提升作业安全性与数据...
-
深圳AGV3D相机厂家
3D激光雷达及其在测绘领域的主要应用 3D激光雷达(LiDAR)是通过发射激光脉冲、测量反射时间,获取目标位置、形状和速度的主动式遥感技术,凭借高精度、高分辨率、高效率的优势,在测绘领域极具应用前景。 地形测绘中,它可快速捕捉地表三维细节,生成高精度数字高程模型(DEM),为城市规划、道路设计、水利工程提供支撑。建筑物测量时,其非接触式测量方式,能规避传统方法的安全隐患与低效问题,可用于建筑重建、立面分析、安全评估,为城市规划、文物保护提供依据。此外,它能穿透树冠,获取林下地形与植被信息,助力森林资源调查,为生态保护提供科学参考。sparkbot推出的3D视觉检测方案有效解决立体仓库因刚性形变...
-
 天津机械狗3D相机模块
天津机械狗3D相机模块3D激光雷达测绘技术的发展趋势及总结 3D激光雷达外形轻巧紧凑,探测距离与效率不断提升,支持三回波与双扫描模式,较广泛应用于电力、林业、移动测绘、智慧城市等场景,是测绘领域的高效测量工具。 其发展呈现三大趋势:一是高精度与高分辨率持续升级,适配复杂测绘场景;二是多源数据融合,与光学、雷达遥感深度结合,提升测绘结果可靠性;三是智能化自动化,依托人工智能实现自动识别、数据预处理等功能,提升效率与质量。随着技术进步,3D激光雷达将在测绘领域发挥更大作用,其发展趋势也将为该领域注入新活力。sparkbot的3D tof相机、3D激光雷达系列产品。天津机械狗3D相机模块火灾现场复盘勘查领域已进入科技化复...
-
 西安人形机器人3D相机扫描
西安人形机器人3D相机扫描在交通事故现场勘查领域,该领域已经进入全链条数字化阶段,其勘查方案集成3D激光雷达扫描、SLAM(同步定位与建图)、人工智能与数字化绘图技术,实现了“高效采集-实时建模-智能绘图-综合管理”的闭环。现场勘查人员使用手持式3D激光雷达SLAM扫描仪,需环绕现场行走一圈,约5分钟即可完成数据采集,同步获取高精度点云与高清影像。通过AI智能量算与符合国标的图符库,系统能自动生成标准化现场图纸,并支持三维点云、360°全景、3D高斯模型等多模式沉浸式展示,将复杂事故现场全息化、结构化还原,形成完整数字化证据链,极大提升了勘查效率、精度与跨部门协同能力。sparkbot团队推出的智能3D检测系统,有效弥...
-
苏州无人机3D相机统计
室内三维建模融合技术应用说明 在室内三维建模场景中,为实现高精度数字化复刻,采用倾斜摄影与激光扫描融合技术,结合ToF技术创新应用,达成效率与精度的双重突破,满足场景化建模重要需求。 室外区域通过倾斜摄影技术获取多维度影像数据,搭配激光扫描技术弥补单一摄影的精度短板,协同完成数据采集与融合处理,严格控制室外平面精度≤3cm;室内库房场景聚焦结构细节,依托激光扫描的高精度优势,准确捕捉库房墙体、梁柱、货架等结构特征,确保室内库房结构精度≤2cm,实现细节无遗漏的精细化建模。 3D ToF雷达技术重塑行业建模模式,基于飞行时间测距原理,将现实建筑结构快速转化为高精度三维点云数据,经去噪、拼接等处理...
-
上海托盘3D相机扫描
3D激光雷达测绘技术的发展趋势及总结 3D激光雷达外形轻巧紧凑,探测距离与效率不断提升,支持三回波与双扫描模式,较广泛应用于电力、林业、移动测绘、智慧城市等场景,是测绘领域的高效测量工具。 其发展呈现三大趋势:一是高精度与高分辨率持续升级,适配复杂测绘场景;二是多源数据融合,与光学、雷达遥感深度结合,提升测绘结果可靠性;三是智能化自动化,依托人工智能实现自动识别、数据预处理等功能,提升效率与质量。随着技术进步,3D激光雷达将在测绘领域发挥更大作用,其发展趋势也将为该领域注入新活力。基于3D视觉传感器,sparkbot推出了人工叉车识别系统与库位状态识别系统,为仓储物流提供一体化。上海托盘3D相...
-
结构光3D相机定位
小区/园区配送机器人借助3D激光雷达,实现无接触准确配送。其360°全向视场角,可识别园区道路、绿化带、围栏、行人、宠物等各类障碍物,灵活规避。30万点/秒的点云速率,能快速构建园区3D地图,结合GPS+RTK定位,实现楼栋、单元门准确定位,误差控制在1cm左右。≤2cm的测距精度,确保机器人准确停靠单元门口、电梯口,避免碰撞车辆、行人。激光雷达结合AI视觉,可区分可移动障碍物与固定设施,毫秒级避障响应,适配园区复杂路况,实现快递、生鲜等物资的自主配送,提升配送效率与便捷度。sparkbot团队的3D视觉相机模组助力智能割草机器人适用于家庭庭院、公园、高尔夫球场等室内外草。结构光3D相机定位水...
-
 济南机器3D相机厂家
济南机器3D相机厂家场景:港口码头,存在集装箱、起重机、运输车辆、码头工人等障碍物,地面粗糙、有坡度,面临强光、海风、雨天等复杂环境,需高效搬运集装箱且避免碰撞大型设备。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,采用相机融合技术,结合3D ToF与dToF数据,实现远距离集装箱、起重机的高精度探测与近距离运输车辆、工人的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面坡度及可通行区域,构建港口三维环境模型,深度优化系统延迟,应对运输车辆移动、集装箱堆放偏差等动态场景,智能适应室外强光、海风与粗糙地面,保障搬运机器人在港口全天候稳定作业,提升搬运效率。杭州星火博特3D视觉相机可提供经济高...
-
 长沙AGV3D相机测绘
长沙AGV3D相机测绘智能分拣机器人搭载3D激光雷达,实现物流分拣中心的高效准确分拣。其360°全向视场角,可识别分拣台、包裹、传送带等设备,准确区分不同尺寸、重量的包裹。70万点/秒的点云速率,能快速扫描包裹外观,结合AI视觉实现包裹分类识别,准确对接分拣口。≤1cm的测距精度,确保包裹分拣定位准确,避免包裹掉落、错分。激光雷达结合传送带同步定位技术,可适配高速分拣场景,实现包裹的快速抓取、分拣与转运,提升物流分拣效率,降低人工分拣误差,助力智慧物流升级。sparkbot团队推出的智能3D检测系统,有效弥补了单一传感器信息不足的弊端,进一步提升了托盘定。长沙AGV3D相机测绘 3D视觉体积测量系统组成及...
-
长沙视觉3D相机模组
3D激光雷达为农业喷药机器人赋能,解决传统喷药漏喷、重喷、伤苗的痛点。其360°超半球视野,可多方面覆盖田间作物,准确识别作物冠层高度、行距及杂草分布,区分作物与田埂、灌溉设施。高达40万点/秒的点云速率,能快速生成农田3D地形地图,结合作物生长数据,实现准确变量喷药。≤3cm的测距精度,确保喷药喷头与作物冠层保持较佳距离,避免药液浪费与作物损伤。同时,激光雷达具备IPX7防水性能,可在雨天、高温等复杂农业环境中稳定运行,适配千亩级规模化农田作业,助力农业数智化转型。3D TOF相机可分析人员流动轨迹,为商场布局优化、人员调度提供数据支撑,在保障安防安全的同时,。长沙视觉3D相机模组场景:港口...
-
郑州机器3D相机建图
3D ToF技术在数字孪生中的应用优势,结合行业场景可细化为三点,准确适配虚实同步需求: 1. 建模高效准确:智慧工业中,可快速采集GE、西门子等企业的生产设备、生产线三维数据,1:1复刻物理场景,大幅缩短建模周期;自动驾驶领域,能快速构建高保真虚拟道路场景,为Waymo、特斯拉等企业节省场景搭建成本。 2. 实时性突出:工业场景中,可实时捕捉设备运行姿态与损耗,同步反馈至孪生模型,助力故障预判;自动驾驶测试中,实时同步虚拟路况与车载传感器数据,保障仿真测试的实时联动,提升测试效率。 3. 环境适应性强:工业车间强光、粉尘环境下,仍能稳定采集设备数据;户外复杂光照下,可准确还原道路、障碍物细节...
-
苏州立体仓库3D相机测绘
3D ToF无人机复杂环境安全保障场景说明 在茂密林地、城市楼宇峡谷、高压电力巡检等视觉受限场景中,无人机飞行易受遮挡、光线干扰,安全隐患突出,而3D ToF技术成为守护飞行安全的“智慧双眼”,准确构建安全飞行缓冲区。茂密林地中,枝叶交错遮挡视线,3D ToF通过发射红外光脉冲,捕捉光线往返时间差,快速生成实时3D深度地图,准确识别树干、灌丛位置,规避碰撞风险,构建贴合林地地形的缓冲区。城市楼宇峡谷内,高楼遮挡GPS信号,光线明暗不均,3D ToF无需复杂算法,高效提取距离信息,实时感知楼宇间距、墙体轮廓,避免无人机在楼宇间漂移、碰撞,保障低空飞行安全。高压电力巡检场景中,导线、杆塔遮挡视线,...