新闻中心 - 武汉朗维科技有限公司
-
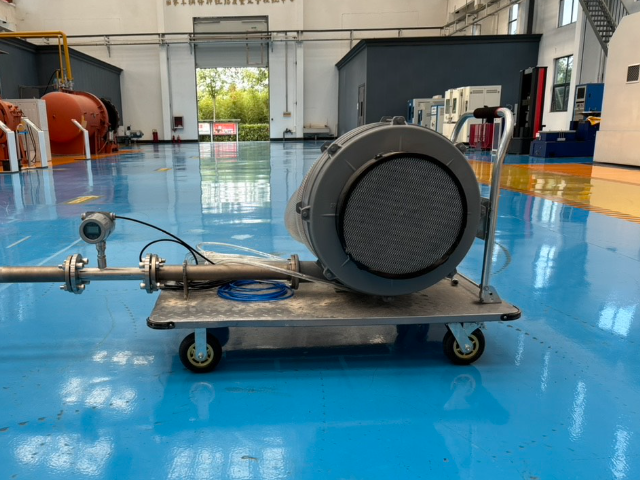
 云南冷藏车箱体强度测试设备批发
云南冷藏车箱体强度测试设备批发高精度恒温优势恒温精度是冷藏车隔热、制冷性能检测准确度的重点关键,武汉朗维科技有限公司冷藏车性能测试设备搭载高精度智能恒温系统,实现测试环境准确控温、恒温稳定,彻底解决传统设备温控波动大、恒温...
发布时间:2026.07.15