-

 山西挂车侧翻试验台厂家电话
发布时间:2026.05.12
山西挂车侧翻试验台厂家电话
发布时间:2026.05.12
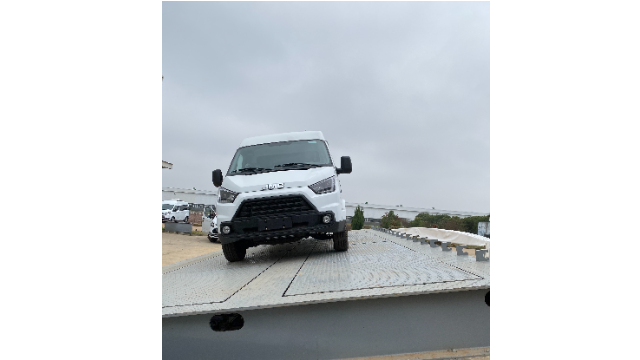
适配改装车辆测试,解决改装车侧翻测试难题,是武汉朗维科技车辆侧翻试验台拓展应用场景的重要优势。改装车辆(如改装货车、改装特种车)因车身结构、载荷分布发生改变,侧翻稳定性测试难度较大,传统试验台往往难以...
-
 河南汽车侧翻试验台厂家有哪些
发布时间:2026.05.12
河南汽车侧翻试验台厂家有哪些
发布时间:2026.05.12
适配新能源汽车测试需求,助力新能源商用车产业发展,是武汉朗维科技车辆侧翻试验台的重要优势的延伸。随着新能源商用车的快速发展,其侧翻稳定性测试面临新的挑战——电池包的重量与安装位置改变了车辆的重心分布,...
-
 浙江多国标兼容车辆距离检测设备
发布时间:2026.05.11
浙江多国标兼容车辆距离检测设备
发布时间:2026.05.11
车身姿态测试设备的环境适应性,是确保设备在不同测试场景下稳定运行的关键。测试场景可能涉及高温、低温、潮湿、粉尘、振动等恶劣环境,设备需具备较强的环境适应性,才能稳定输出准确数据。例如,在高温环境下,设...
-
 北京挂车侧翻试验台服务商
发布时间:2026.05.11
北京挂车侧翻试验台服务商
发布时间:2026.05.11
快速响应市场需求,产品迭代速度快,是武汉朗维科技车辆侧翻试验台持续保持市场竞争力的重要优势。公司密切关注汽车行业的发展趋势与客户需求变化,建立了快速的市场响应机制,能够及时捕捉市场需求痛点,快速调整产...
-
 山东多国标兼容车辆航姿参考系统价格
发布时间:2026.05.11
山东多国标兼容车辆航姿参考系统价格
发布时间:2026.05.11
车身姿态测试设备的操作培训,是确保设备正确使用、发挥设备价值的重要环节。由于车身姿态测试设备结构复杂、技术含量高,操作人员需经过专业培训,掌握设备的工作原理、操作规范、故障排查方法等,才能确保测试工作...
-
内蒙古三轮汽车侧翻试验台厂家
发布时间:2026.05.10
节能降耗性能突出,是武汉朗维科技车辆侧翻试验台贴合现代企业可持续发展理念的重要优势,可帮助客户有效降低长期运营成本。在能源成本持续上升的背景下,该设备采用双平台单独控制设计,支持“平台1”与“平台2”...
-
 江西载货汽车侧翻试验台服务商
发布时间:2026.05.10
江西载货汽车侧翻试验台服务商
发布时间:2026.05.10
噪音控制优异,车间环境友好,是武汉朗维科技车辆侧翻试验台提升用户体验、适配车间常态化使用的重要优势。该设备在设计过程中,采用多重噪音控制技术:液压系统配备静音型泵站与消音装置,减少液压油流动与电机运行...
-
内蒙古叉车五轮仪有哪些品牌
发布时间:2026.05.10
车身姿态测试设备在特种车辆研发中也有着重要应用,能满足特种车辆在极端工况下的测试需求,保障特种车辆的行驶安全与性能稳定。特种车辆(如车辆、消防车辆、工程车辆)常行驶在复杂、恶劣的路况下,对车身姿态的稳...
-
 湖南挂车侧翻试验台服务商
发布时间:2026.05.09
湖南挂车侧翻试验台服务商
发布时间:2026.05.09
现场安装灵活性高,可适配不同场地条件,是武汉朗维科技车辆侧翻试验台贴合客户实际安装需求的重要优势。该设备采用模块化拆分设计,可根据客户场地的尺寸、高度、承重等条件,灵活调整设备的安装布局与组合方式,无...
-
 河南半挂车侧翻试验台厂家
发布时间:2026.05.09
河南半挂车侧翻试验台厂家
发布时间:2026.05.09
数据可视化程度高,可直观呈现试验结果,助力客户快速分析决策,是武汉朗维科技车辆侧翻试验台的重要优势。该设备搭载先进的数据可视化系统,可将试验过程中的各类数据,包括平台角度、轮荷、轴荷、质心位移等,以实...
-
 贵州多国标兼容车辆转向盘中心区试验设备价格
发布时间:2026.05.09
贵州多国标兼容车辆转向盘中心区试验设备价格
发布时间:2026.05.09
车身姿态测试设备的轻量化、便携化设计,已成为行业发展的重要趋势,能有效提升设备的实用性与适用性。传统的车身姿态测试设备体积大、重量重,搬运与安装不便,难以适配户外道路试验、现场检测等场景。近年来,设备...
-
上海汽车侧翻试验台厂家联系方式
发布时间:2026.05.08
操作日志可追溯,便于规范管理与责任追溯,是武汉朗维科技车辆侧翻试验台强化安全管理与质量管控的重要优势。该设备具备完善的操作日志记录功能,可自动记录每一次试验的操作人员、操作时间、测试参数、设备运行状态...
-
 山东多国标兼容汽车外摆值测量采购
发布时间:2026.05.08
山东多国标兼容汽车外摆值测量采购
发布时间:2026.05.08
车身姿态测试设备的日常故障排查,是保障设备正常运行、延长设备使用寿命的关键,需掌握简单的排查思路与方法。传感器信号异常是常见故障,表现为数据跳变、无信号反馈或数值长时间不变化,此时可先检查传感器接口,...
-
宁夏多国标兼容车辆转向盘中心区试验设备采购
发布时间:2026.05.08
不同车型的车身尺寸、底盘结构、载荷分布存在明显差异,因此车身姿态测试设备需进行针对性调整,才能确保测量数据的准确性与参考价值。对于轿车,其底盘较低、车身紧凑,需调整设备的检测高度,避开排气管、悬挂摆臂...
-
 江苏车载姿态监测设备厂家有哪些
发布时间:2026.05.08
江苏车载姿态监测设备厂家有哪些
发布时间:2026.05.08
在汽车气动性能化中,车身姿态测试设备能提供准确的姿态数据,帮助工程师化车身造型,降低气动阻力,提升车辆的燃油经济性与行驶稳定性。气动阻力是影响车辆燃油经济性、高速行驶稳定性的重要因素,而车身姿态(如车...
-
 贵州机动车侧翻试验台厂家联系方式
发布时间:2026.05.08
贵州机动车侧翻试验台厂家联系方式
发布时间:2026.05.08
设备占地面积优化,空间利用率高,适配不同场地条件,是武汉朗维科技车辆侧翻试验台贴合客户实际使用需求的重要优势。传统车辆侧翻试验台往往占地面积大,对场地要求较高,而武汉朗维科技在设备设计过程中,通过结构...
-
江苏三轮车侧翻试验台哪里有
发布时间:2026.05.08
测试数据加密保护,保障客户技术安全,是武汉朗维科技车辆侧翻试验台强化数据安全的重要优势。车辆侧翻测试数据涉及客户的产品设计、技术参数等敏感信息,武汉朗维科技高度重视数据安全,在设备设计过程中采用多重加...
-
 天津车辆侧翻试验台哪里有卖
发布时间:2026.05.08
天津车辆侧翻试验台哪里有卖
发布时间:2026.05.08
多语言操作界面,适配海外客户使用,是武汉朗维科技车辆侧翻试验台拓展国际市场的重要优势。该设备的操作软件与现场触摸屏均支持中文、英文、德文、法文等多种国际主流语言,可根据客户需求灵活切换,界面布局与操作...
-
 新疆汽车最小转弯通道圆直径测试设备厂家有哪些
发布时间:2026.05.08
新疆汽车最小转弯通道圆直径测试设备厂家有哪些
发布时间:2026.05.08
激光雷达测量技术在车身姿态测试设备中的应用,进一步提升了设备的测量精度与抗干扰能力。激光雷达通过发射激光束扫描车身及周边环境,利用回波时间差和相位变化构建三维模型,能准确测量车身的位移、角度等参数,抗...
-
 陕西整车制动性能检测设备有哪些品牌
发布时间:2026.05.08
陕西整车制动性能检测设备有哪些品牌
发布时间:2026.05.08
武汉朗维科技有限公司的车身姿态测试设备具备强大的空气动力学测试功能,可助力研发团队优化车辆气动设计,降低气动阻力,提升车辆燃油经济性与行驶稳定性。该设备搭载高精度激光高度传感器,可实时监测车辆在高速行...
-
贵州货车侧翻试验台采购
发布时间:2026.05.07
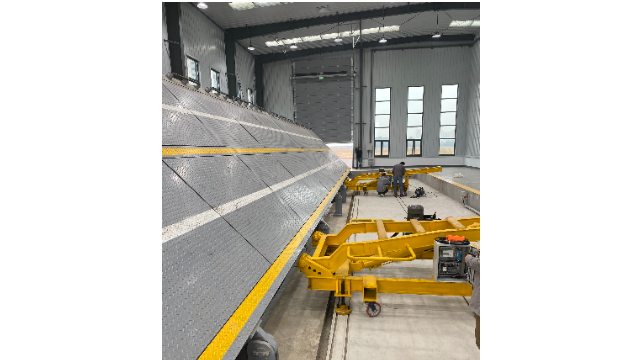
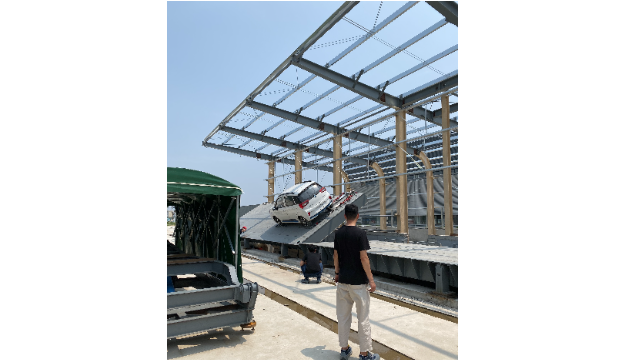
多车型兼容适配能力,让武汉朗维科技车辆侧翻试验台具备的应用场景,可满足不同客户的多样化测试需求,性价比优势凸显。该设备台面尺寸采用22000mm×3800mm×2的双平台设计,倾斜角上限≥50°,适用...
-
 湖北汽车稳态回转测试仪多少钱
发布时间:2026.05.07
湖北汽车稳态回转测试仪多少钱
发布时间:2026.05.07
视觉测量系统是近年来兴起的一种新型车身姿态测试设备,凭借非接触式测量的势,在极端工况测试中展现出独特价值。该系统通过多个高速相机同步拍摄车身特征点,结合图像识别算法计算车身姿态参数,无需在车身上安装任...
-
天津载货汽车侧翻试验台哪里有卖
发布时间:2026.05.07
应用场景,可满足不同行业客户的测试需求,是武汉朗维科技车辆侧翻试验台的重要优势。该设备不适用于汽车生产企业,用于车辆研发、生产抽检与质量管控,还可应用于科研机构、高等院校、第三方检测机构等各类单位:科...
-
 江苏客车侧翻试验台厂家联系方式
发布时间:2026.05.07
江苏客车侧翻试验台厂家联系方式
发布时间:2026.05.07
严格的品控管理,产品质量可靠,是武汉朗维科技车辆侧翻试验台赢得客户长期信赖的基础。公司建立了覆盖原材料采购、生产加工、调试出厂全流程的质量管理体系,通过ISO 9001质量管理体系认证,每一个环节都进...
-
上海叉车侧翻试验台厂家
发布时间:2026.05.07
试验效率高,可大幅缩短客户研发与检测周期,是武汉朗维科技车辆侧翻试验台的重要优势,能够为客户创造更高的时间价值。该设备采用模块化设计与自动化操控相结合的方式,大幅减少试验准备时间与试验过程耗时:模块化...
-
 车辆爬坡测试设备测试标准
发布时间:2026.05.07
车辆爬坡测试设备测试标准
发布时间:2026.05.07
武汉朗维科技有限公司的车身姿态测试设备具备强大的轨迹回放功能,可还原车辆测试过程中的车身姿态变化,为数据分析与故障排查提供有力支撑。该设备可详细记录车辆测试过程中的每一组车身姿态数据、行驶轨迹,通过数...
-
 西藏工程定位软件生产厂家
发布时间:2026.05.07
西藏工程定位软件生产厂家
发布时间:2026.05.07
视觉/INS组合导航是针对室内及复杂遮挡场景设计的比较好导航方案,其比较大优势在于无需依赖卫星信号,可在GNSS信号完全失效的环境中实现精细导航,***适用于工业机器人、仓储物流、地下工程、矿井作业等...
-
 河南车辆蛇形试验设备厂家电话
发布时间:2026.05.07
河南车辆蛇形试验设备厂家电话
发布时间:2026.05.07
武汉朗维科技有限公司深耕车身姿态测试领域十余年,其研发的车身姿态测试设备凭借强大的功能与高可靠性,已应用于新能源汽车研发领域,适配新能源汽车的特殊测试需求。新能源汽车因搭载电池包,车身重心、重量分布与...
-
客车侧翻试验台生产厂家
发布时间:2026.05.06
模块化升级便捷,可实现按需拓展,无需停机改造,是武汉朗维科技车辆侧翻试验台提升设备使用寿命与性价比的重要优势。该设备采用全模块化设计,无论是硬件功能模块(如称重模块、倾角测量模块),还是软件功能模块(...
-
上海机动车侧翻试验台
发布时间:2026.05.06
可扩展性强,可根据客户需求灵活拓展功能,是武汉朗维科技车辆侧翻试验台的重要优势,能够适应客户后续测试需求的变化。该设备采用模块化与标准化的设计理念,各功能模块之间采用标准化接口连接,具备极强的灵活性与...