新闻中心 - 上海达宽科技有限公司
-
 中国台湾新蓝机器人力控系统调试
中国台湾新蓝机器人力控系统调试达宽科技的柔性力控系统软件支持两种补偿类型,并提供的运动参数设置,覆盖六个自由度,确保机器人在各种操作环境中实现精细控制。软件通过读取力传感器数据,使机器人能够实时调整位置和姿态,从而保证作业过程的精...
发布时间:2025.03.11 -
 辽宁机器人力控系统报价
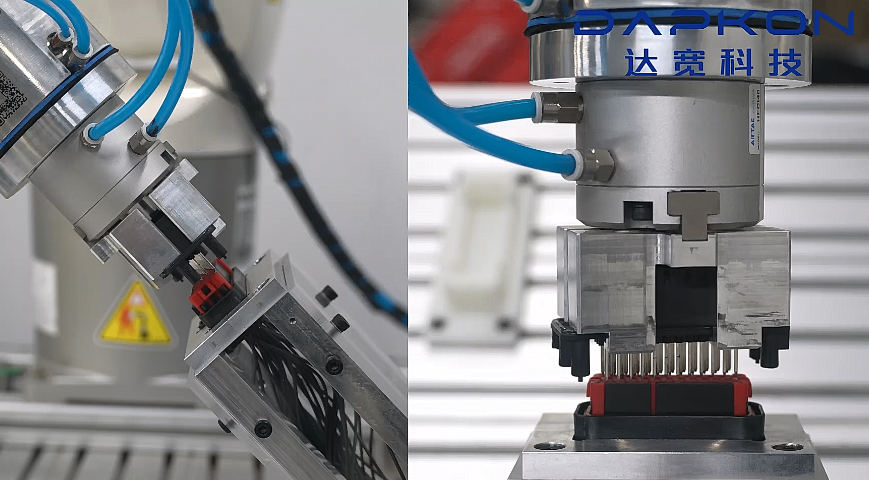
辽宁机器人力控系统报价以ABB工业机器人为例,我们来讲解如何借助达宽平台级力控大脑装配服务器的多种线束。首先,借助工具坐标系精细地示教多个线束接口与多个服务器接口的对应初始位置。需注意,该服务器拥有多种规格的接口,我们进行...
-
 广东简控力控系统方案
广东简控力控系统方案在医疗设备与生物工程领域,力位检测对于人造骨骼强度检测至关重要,尤其在评判其机械性能、耐久性与安全性方面发挥着关键作用。借助达宽科技的力控系统,利用特制工装模拟人体对骨骼施加的正常或极端力量,以此检测...
-
 江西工业机器人力控技术指导
江西工业机器人力控技术指导质量控制和检测是确保产品符合标准的关键环节。机器人力控技术通过精确的力控制,可以使机器人在检测过程中进行细致入微的操作,确保每一项检测都达到高标准。与传统的人工检测相比,机器人力控能够在长时间内保持稳...
-
 广西协作机器人力控调试
广西协作机器人力控调试机器人力控技术是当今工业自动化领域的一项重要创新,它通过精确控制机器人与环境的接触力,使机器人能够在各种任务中提供更高的效率、精度和安全性。随着科技的不断进步,机器人力控已广泛应用于多个行业,尤其是在...
-
上海工业机器人力控原理
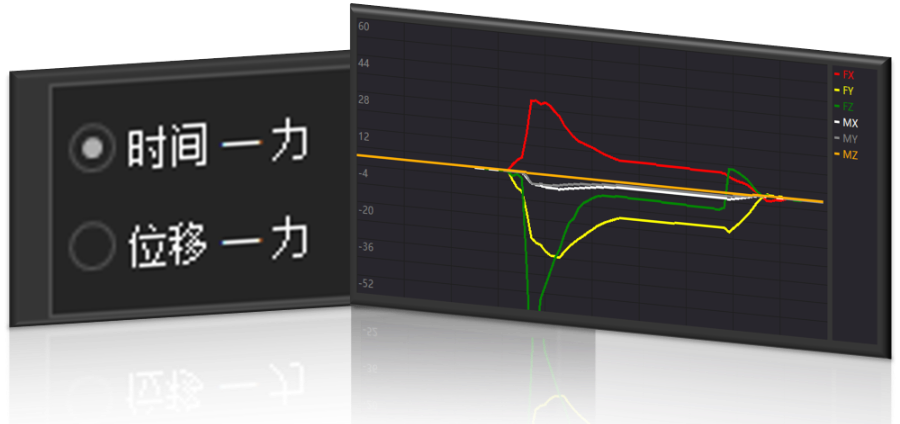
机器人力控不仅限于硬件上的技术提升,它在操作界面的智能化方面也有很大进展。随着机器人技术的发展,越来越多的企业开始使用智能化的操作界面来监控和控制生产过程。机器人力控技术集成了先进的数据采集与分析系统...
-
中国澳门工业机器人力控报价
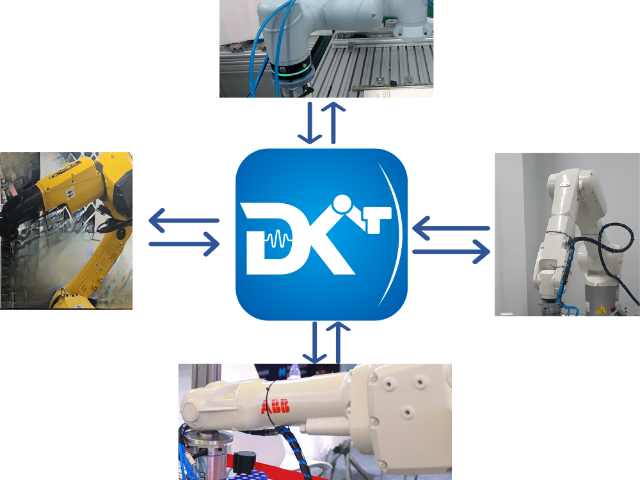
在现代智能化制造中,多个机器人常常需要协同工作以完成复杂的生产任务。机器人力控技术在这一过程中扮演了重要角色。通过精确的力感知和控制,机器人能够与其他机器人无缝协作,避免碰撞和,确保各个机器人的工作能...
-
 青海工业机器人力控优点
青海工业机器人力控优点在现代智能化制造中,多个机器人常常需要协同工作以完成复杂的生产任务。机器人力控技术在这一过程中扮演了重要角色。通过精确的力感知和控制,机器人能够与其他机器人无缝协作,避免碰撞和,确保各个机器人的工作能...
-
 天津工业机器人力控推广
天津工业机器人力控推广机器人力控技术,简单来说,就是机器人能够感知并调节与物体接触时所施加的力,保持操作过程中的精确性和安全性。这一技术通过结合力传感器、控制算法和执行器,使机器人能够根据实时反馈调整其动作。与传统的“位置...