-
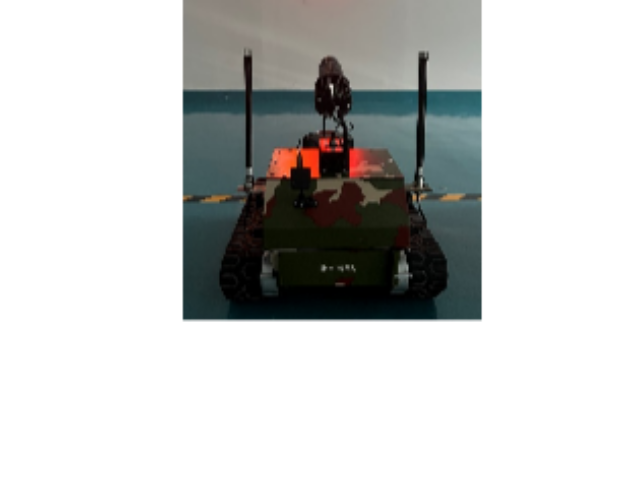
 苏州自动导航中型全地形履带式心战机器人哪里买
苏州自动导航中型全地形履带式心战机器人哪里买宇卫创海智能装备(苏州)有限公司
-
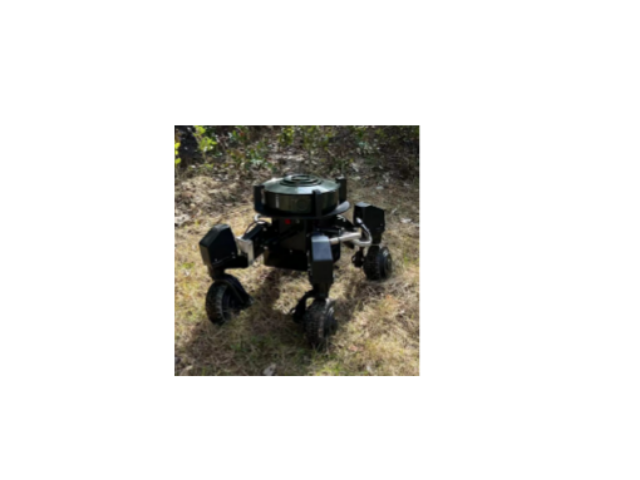
 自动导航中型全地形履带式心战机器人哪里买
自动导航中型全地形履带式心战机器人哪里买宇卫创海智能装备(苏州)有限公司
-
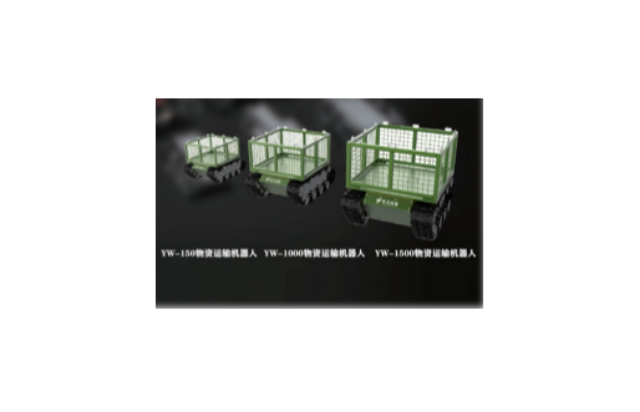
 苏州物质运输及救援机器人供货公司
苏州物质运输及救援机器人供货公司宇卫创海智能装备(苏州)有限公司
-
 苏州负重20KG中大型单摆臂履带排爆机器人供货公司
苏州负重20KG中大型单摆臂履带排爆机器人供货公司宇卫创海智能装备(苏州)有限公司
-
 履带式物资运输机器人多少钱
履带式物资运输机器人多少钱宇卫创海智能装备(苏州)有限公司
-
 武汉履带式心战机器人
武汉履带式心战机器人宇卫创海智能装备(苏州)有限公司
-
 潍坊物资运输机器人
潍坊物资运输机器人宇卫创海智能装备(苏州)有限公司
-
 江苏负重10KG中型单摆臂履带排爆机器人供应价格
江苏负重10KG中型单摆臂履带排爆机器人供应价格宇卫创海智能装备(苏州)有限公司
-
 江苏履带式察打一体机器人哪家正规
江苏履带式察打一体机器人哪家正规宇卫创海智能装备(苏州)有限公司
-
 上海全地形轮式运输机器人生产公司
上海全地形轮式运输机器人生产公司宇卫创海智能装备(苏州)有限公司
-
江苏负重5KG小型履带排爆机器人生产
宇卫创海智能装备(苏州)有限公司
-
 智能中型排爆机器人供货商
智能中型排爆机器人供货商宇卫创海智能装备(苏州)有限公司
-
人机交互层面,特情救援机器人通过多模态通信技术实现与后方指挥中心的实时数据互通。5G网络支持下的4K视频传输与AR投影技术,可将机...
-
特情救援机器人功能的重要在于突破复杂环境对人类救援行动的物理限制,其设计融合了多模态感知、自主决策与高适应性执行三大技术维度。在感...
-

中大型单摆臂履带排爆机器人在复杂环境下的功能适配性集中体现在其机械臂与底盘的协同设计上。以北京凌天研发的中型排爆机器人为例,其单摆...
-
动力系统的精确控制是单摆臂履带机器人适应危险环境的关键。该类机器人通常搭载24V快换直流电池组,支持两组12V电池热备份,确保在电...
-

小型排爆机器人的功能设计高度聚焦于模块化与适应性,以应对不同场景下的多样化威胁。其传感器阵列通常包含毫米波雷达、气体检测仪及声波定...