-
 安徽铅酸电池瑕疵检测系统趋势
安徽铅酸电池瑕疵检测系统趋势扬州熙岳智能科技有限公司
-
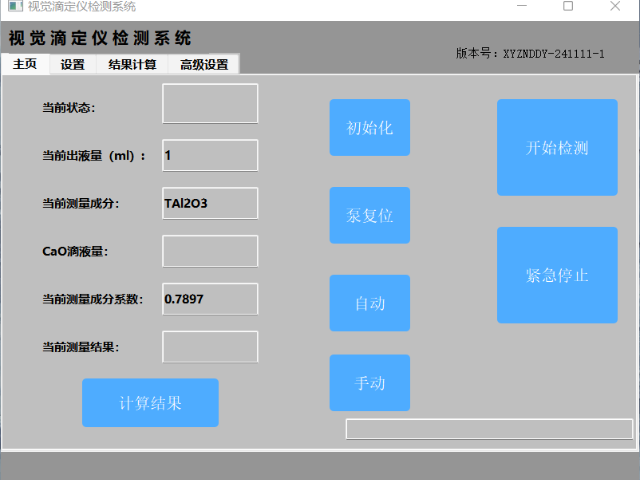 云南综合视觉滴定仪性能
云南综合视觉滴定仪性能扬州熙岳智能科技有限公司
-
 安徽视觉滴定仪供应商
安徽视觉滴定仪供应商扬州熙岳智能科技有限公司
-
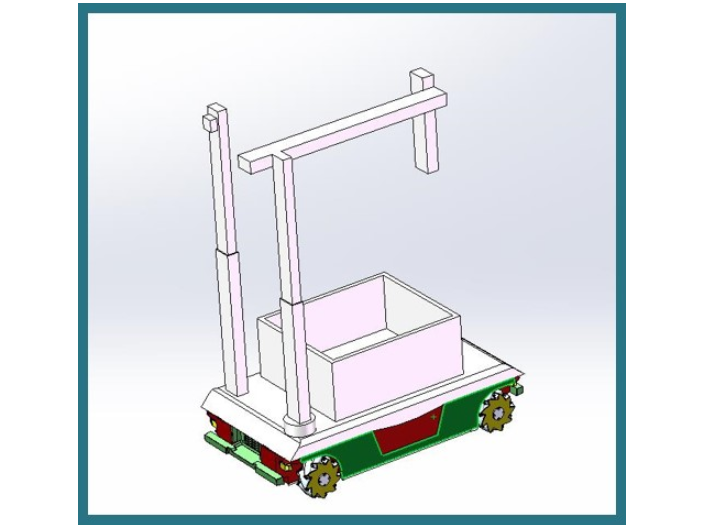
 江西供应智能采摘机器人供应商
江西供应智能采摘机器人供应商扬州熙岳智能科技有限公司
-
 山东现代智能采摘机器人处理方法
山东现代智能采摘机器人处理方法扬州熙岳智能科技有限公司
-
 天津自动化智能采摘机器人技术参数
天津自动化智能采摘机器人技术参数扬州熙岳智能科技有限公司
-
 江苏果蔬智能采摘机器人功能
江苏果蔬智能采摘机器人功能扬州熙岳智能科技有限公司
-
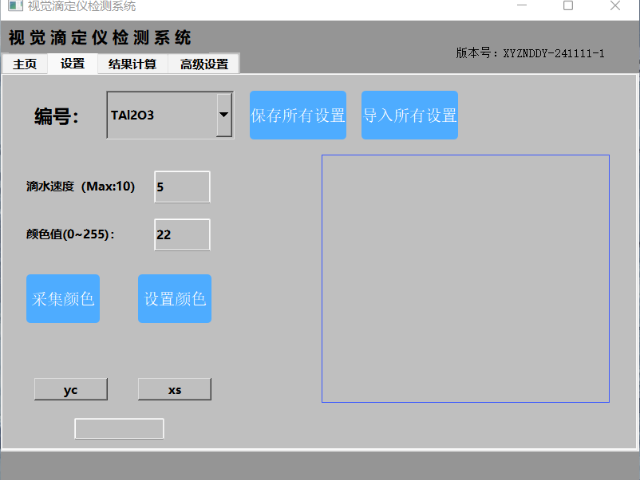 云南自动化视觉滴定仪供应商
云南自动化视觉滴定仪供应商扬州熙岳智能科技有限公司
-
天津草莓智能采摘机器人定制
扬州熙岳智能科技有限公司
-
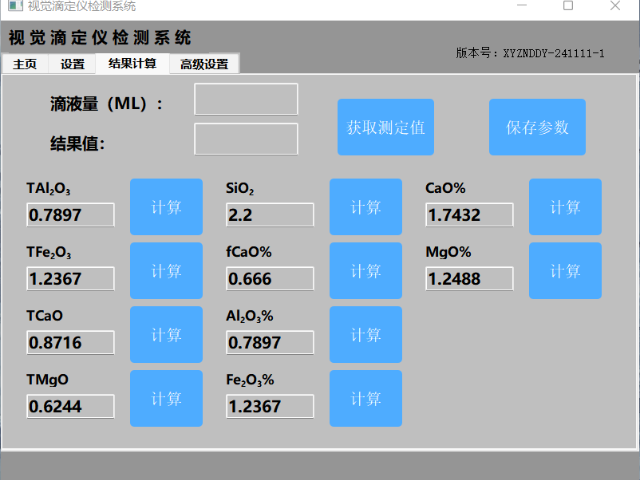
 自动视觉滴定仪有哪些
自动视觉滴定仪有哪些扬州熙岳智能科技有限公司
-
 安徽国内视觉滴定仪有哪些
安徽国内视觉滴定仪有哪些扬州熙岳智能科技有限公司
-
 福建猕猴挑智能采摘机器人性能
福建猕猴挑智能采摘机器人性能扬州熙岳智能科技有限公司
-

随着人工智能技术的深入发展,瑕疵检测系统正朝着更深度的智能化、更快速的部署与更灵活的适配方向发展。小样本学习(Few-shot L...
-

多机器人协同作业是采摘机器人规模化应用的重要模式,通过采摘机器人、转运机器人、分拣机器人的分工协作,实现从采摘到入库的全流程自动化...
-
我们的定制视觉检测服务,始终以客户为中心,致力于提供品质支持。从服务启动之初,我们便摒弃 “一刀切” 的通用模式,组建专属项目小组...
-
瑕疵检测系统为企业提供了全流程、可追溯的质量管控体系,是实现数字化工厂转型的关键数据入口。系统在完成检测的同时,会自动记录每一件产...
-
采摘机器人的作业效率与稳定性,直接决定了其在农业生产中的应用价值,目前主流采摘机器人的作业效率已远超人工,且具备较强的环境适应性和...