标签列表 - 深圳市瑞必拓科技有限公司
-
 大扭矩直流无刷电机生产厂家
大扭矩直流无刷电机生产厂家在民用与医疗领域,150W直流无刷电机的低噪声与长寿命特性使其成为关键设备升级选择的方案。家用电器中,该电机通过变频驱动技术实现吸尘器吸力无级调节,较传统有刷电机噪音降低15分贝,同时将能耗控制在80W以下,符合一级能效标准。医疗场景下,电机的高可靠性直接关系到设备安全——在康复训练器械中,其低速大扭矩特性可模拟人体关节运动轨迹,通过编码器实时监测转子位置,确保输出扭矩波动小于±2%,避免因动力突变造成二次损伤;在电动病床的升降系统中,双电机同步控制技术结合扭矩冗余设计,即使单台电机故障仍能维持基本功能,为危重患者转运提供安全保障。随着物联网技术发展,集成CAN总线接口的智能电机正逐步普及,通...
发布时间:2026.04.03 -
 广西900w直流无刷电机
广西900w直流无刷电机直流无刷电机凭借其高效、低噪、长寿命的重要优势,已成为现代工业与消费电子领域的关键驱动部件。其通过电子换向器替代传统电刷结构,彻底消除了机械摩擦产生的能量损耗与火花干扰,使电机效率提升至85%以上,同时将运行噪音控制在40分贝以下,特别适用于对静音要求严苛的场景。在智能家居领域,直流无刷电机驱动的空气净化器、扫地机器人等产品,通过精确的转速调节实现能耗与性能的平衡,例如根据室内空气质量动态调整风机转速,既延长了设备续航时间,又避免了传统电机频繁启停带来的损耗。在工业自动化场景中,其高响应速度与宽调速范围特性,使数控机床、3D打印机等设备能够实现微米级定位精度,配合闭环控制系统可实时修正运行偏差...
-
沈阳直流无刷电机主要厂家
外转子直流无刷电机凭借其独特的结构设计,在电机领域展现出明显优势。其重要特征在于将转子置于电机外部,定子则位于内部,这种布局使得电机运行时外壳整体旋转,而定子保持静止。相较于传统内转子电机,外转子结构的转动惯量更大,能够在相同体积下提供更稳定的扭矩输出,尤其适合需要直接驱动大负载的应用场景。例如在工业自动化生产线中,外转子电机可直接驱动传送带或机械臂,无需额外减速装置,既简化了机械结构,又降低了能量损耗。此外,其定子绕组通常采用集中式布局,配合永磁转子的高磁能积特性,使得电机在低速运行时仍能保持高效率,这一特性在需要频繁启停的设备中尤为重要,如纺织机械的纱线张力控制系统或印刷设备的纸张输送模块...
-
 福州直流无刷电机主要参数
福州直流无刷电机主要参数从应用场景扩展性分析,24V直流无刷电机正深度渗透至新能源与智能交通领域。在电动汽车热管理系统,24V无刷水泵以95%的能效比替代传统机械泵,配合48V轻混系统的电压兼容设计,实现冷却流量与能耗的动态匹配。农业无人机领域,该电压等级电机驱动的植保喷洒系统,通过PWM调速技术将药液雾化粒径控制在50-200μm区间,作业效率较液压系统提升3倍。智能家居场景中,24V无刷电机驱动的智能窗帘、空气净化器等产品,借助正弦波驱动技术将运行噪音降至28dB以下,接近环境本底噪声水平。技术发展趋势显示,第三代宽禁带半导体(SiC/GaN)功率器件的应用,使24V电机系统效率突破92%,同时通过AI算法优化的...
-
 西宁直流无刷电机工作原理
西宁直流无刷电机工作原理直流无刷电机凭借其高效能特性在工业领域占据明显优势。相较于传统有刷电机,其采用电子换向技术彻底消除了电刷与换向器间的机械摩擦,不仅降低了能量损耗,更使电机运行效率提升至85%以上。这种设计使电机在持续运转中保持稳定的功率输出,尤其适用于需要长时间运行的生产设备。其结构简化带来的可靠性提升同样明显,由于取消了易磨损的电刷组件,电机故障率大幅下降,维护周期延长至传统电机的2-3倍。在精密制造场景中,无刷电机展现出的低电磁干扰特性尤为关键,电子换向系统产生的脉冲噪声较传统电机降低40%以上,为数控机床、3D打印设备等对振动敏感的装备提供了更稳定的运行环境。此外,其调速性能的突破性提升改变了传统工业设...
-
 福建一体式直流无刷电机
福建一体式直流无刷电机直流无刷电机型号的多样性源于其普遍的应用场景与性能需求。以工业自动化领域为例,高精度数控机床主轴驱动系统常选用具备正弦波磁场驱动特性的无刷电机型号,这类电机通过矢量控制算法实现转矩与转速的精确解耦,配合高分辨率编码器可达成微米级加工精度。其定子绕组采用分布式绕线工艺,转子磁钢选用钕铁硼材料,在2000-6000rpm转速范围内可维持95%以上的效率,特别适用于精密磨削、铣削等重载切削场景。而物流仓储领域的AGV小车则多采用外转子结构的三相无刷电机,此类型号通过增加转子磁极数量提升扭矩密度,配合FOC控制技术实现动态负载下的平稳启停,在满载500kg工况下仍能保持0.5m/s²的加速度,且防护等...
-
 贵州内转子无刷直流电机
贵州内转子无刷直流电机在民用领域,500W直流无刷电机的应用正推动家电产品向智能化、节能化方向升级。以某品牌变频空调室外机为例,其搭载的500W外转子无刷电机通过优化磁路设计,在低转速(800-1200转/分钟)下即可输出1.2N·m的持续扭矩,较传统异步电机节能42%的同时,将运行噪音降低至48dB以下。该电机采用IP55防护等级设计,外壳为铝合金压铸成型,内部绕组采用真空浸漆工艺,可耐受-25℃至60℃的极端温度与95%湿度环境,确保在户外长期稳定运行。更值得关注的是,其内置的霍尔传感器与闭环控制系统支持电机状态实时监测,当检测到负载突变(如风扇叶片卡滞)时,驱动器会在0.1秒内切断电源并反馈故障代码,这种主动...
-
成都高速直流无刷电机
在节能与环保需求日益突出的背景下,外转子无刷直流电机的能效优势进一步凸显。其采用永磁体励磁,消除了励磁电流损耗,配合低铜耗绕组设计,综合效率较传统异步电机提升15%-30%,明显降低了能源消耗。这一特性使其在风机、泵类等变负载设备中表现尤为突出,通过智能调速功能实现按需供能,避免大马拉小车的浪费现象。同时,电机的小型化与轻量化设计减少了材料用量,契合绿色制造理念。在智能家居领域,外转子无刷直流电机驱动的空调压缩机、洗衣机直驱系统等,通过低噪音运行与精确温控,提升了用户体验。而在新能源汽车领域,其高功率密度特性支持轮毂电机与集成化驱动系统的开发,为车辆轻量化与空间优化提供了技术支撑。随着碳化硅功...
-
呼和浩特500w直流无刷电机
三相直流无刷电机的重要工作原理基于电磁感应定律与电子换向技术,其重要结构由定子、转子、位置传感器及电子控制器组成。定子采用三相绕组布局,通常以星形或三角形方式连接,绕组由硅钢片叠压而成以减少涡流损耗。转子为永磁体结构,常见钕铁硼材料提供强磁场,磁极对数直接影响转速与扭矩特性。工作时,直流电源通过逆变电路转换为三相交流电,按特定时序为两相绕组供电,形成旋转磁场。例如,在六步换向法中,控制器根据位置传感器反馈的转子位置,每60°电角度切换一次导通相,使定子磁场矢量以阶梯式旋转。当转子N极接近某相绕组时,该相绕组通电产生S极磁场,通过异性相吸原理驱动转子持续旋转。这种电子换向机制取代了传统有刷电机的...
-
无锡24v直流无刷电机
120W直流无刷电机作为中小功率驱动领域的重要部件,凭借其高效能、低噪音与长寿命特性,在消费电子、工业自动化及家用电器领域展现出明显优势。该类电机采用永磁转子与电子换向技术,彻底摒弃传统有刷电机的碳刷与换向器结构,从根源上消除了电火花与机械磨损问题,使维护周期延长至传统电机的3倍以上。以120W功率段为例,其效率可达85%-90%,相比同功率有刷电机节能20%-30%,在持续运行的家电设备中可明显降低能耗成本。例如,在空气净化器、加湿器等需要长时间运转的场景中,该电机通过正弦波驱动技术实现平稳调速,将振动幅度控制在0.5mm以内,噪音值低于40分贝,满足夜间使用的静音需求。此外,其紧凑的外形设...
-
内转子无刷直流电机生产商
48V直流无刷电机马达凭借其高效能、低噪音和长寿命特性,已成为工业自动化与高级消费设备领域的重要动力组件。该类电机采用电子换向技术替代传统电刷结构,通过霍尔传感器实时感知转子位置,结合控制器精确调节三相绕组电流方向,实现磁场与转子永磁体的同步旋转。以48V/4.8KW防水型电机为例,其额定转速达3000rpm,转矩输出15NM,IP68防护等级可适应潮湿或粉尘环境,普遍应用于数控机床主轴驱动、自动化物流分拣系统及户外工程设备。在调速性能方面,FOC(磁场定向控制)算法通过解耦转矩与磁通分量,使电机在0-3000rpm范围内实现线性响应,负载突变时转速波动控制在±1%以内,较传统感应电机效率提升...
-
48v直流无刷电机生产厂
48V直流无刷电机马达凭借其高效能、低噪音和长寿命特性,已成为工业自动化与高级消费设备领域的重要动力组件。该类电机采用电子换向技术替代传统电刷结构,通过霍尔传感器实时感知转子位置,结合控制器精确调节三相绕组电流方向,实现磁场与转子永磁体的同步旋转。以48V/4.8KW防水型电机为例,其额定转速达3000rpm,转矩输出15NM,IP68防护等级可适应潮湿或粉尘环境,普遍应用于数控机床主轴驱动、自动化物流分拣系统及户外工程设备。在调速性能方面,FOC(磁场定向控制)算法通过解耦转矩与磁通分量,使电机在0-3000rpm范围内实现线性响应,负载突变时转速波动控制在±1%以内,较传统感应电机效率提升...
-
 无锡直流无刷电机内部结构
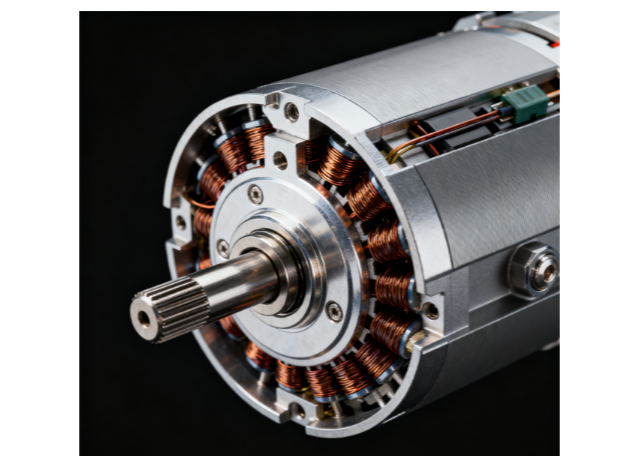
无锡直流无刷电机内部结构位置传感器作为电子换向的关键部件,通过实时监测转子角度实现精确控制。霍尔传感器是常见的低成本方案,其工作原理基于霍尔效应:当转子永磁体旋转至传感器附近时,磁场变化使半导体材料产生电压脉冲,每60°电角度输出一个方波信号,控制器据此判断转子位置区间。对于高精度需求场景,光电编码器或磁电编码器可提供更细致的反馈,例如1024线编码器每转输出1024个脉冲,通过A/B相正交信号可计算转速与转向,甚至通过Z相索引信号实现位置定位。无位置传感器技术则通过检测定子绕组反电动势(Back-EMF)估算转子位置,当电机旋转时,绕组切割磁感线产生的感应电压波形与转子角度直接相关,通过分析三相反电动势的过零点或相...
-
江苏直流无刷电机生产商
从应用领域看,高压直流无刷电机的技术优势正推动多行业向高效化、智能化转型。在工业自动化领域,其高动态响应特性(转速调节时间可缩短至毫秒级)使其成为数控机床、3D打印设备的主流驱动方案,配合闭环控制系统可实现±0.1%的转速精度,大幅提升加工效率。在新能源汽车领域,高压直流无刷电机通过集成化设计(如将驱动器与电机一体化),不仅减轻了车身重量,更通过再生制动技术将能量回收效率提升至85%以上,明显延长续航里程。在航空航天领域,其耐颠簸震动特性(振动加速度耐受值可达20g)和轻量化结构(功率密度比传统电机提高30%)使其成为无人机、卫星姿态调整系统的重要部件。随着碳化硅(SiC)功率器件的成熟,高压...
-
48v直流无刷电机马达厂家直供
直流无刷电机凭借其高效、低噪、长寿命的重要优势,已成为现代工业与消费电子领域的关键驱动部件。其通过电子换向器替代传统电刷结构,彻底消除了机械摩擦产生的能量损耗与火花干扰,使电机效率提升至85%以上,同时将运行噪音控制在40分贝以下,特别适用于对静音要求严苛的场景。在智能家居领域,直流无刷电机驱动的空气净化器、扫地机器人等产品,通过精确的转速调节实现能耗与性能的平衡,例如根据室内空气质量动态调整风机转速,既延长了设备续航时间,又避免了传统电机频繁启停带来的损耗。在工业自动化场景中,其高响应速度与宽调速范围特性,使数控机床、3D打印机等设备能够实现微米级定位精度,配合闭环控制系统可实时修正运行偏差...
-
昆明高压直流无刷电机
在转子结构上,直流无刷电机进一步细分为内转子与外转子两种类型。内转子设计将永磁体固定于转轴内侧,定子绕组环绕在外,其优势在于散热效率高,适合高转速场景;外转子则将永磁体贴附于外壳内壁,定子位于中心,这种结构转动惯量大,运行平稳,常见于风扇、无人机等需要低速大扭矩的应用。位置传感器作为电子换向的关键,通常采用霍尔元件或编码器。霍尔传感器通过检测转子磁场变化输出方波信号,每60°电角度触发一次,成本低且可靠性高;编码器则通过光电或磁电原理生成更高精度的正交脉冲信号,支持精确速度与位置控制。此外,部分无刷电机采用无传感器技术,通过反电动势过零检测估算转子位置,进一步简化结构并降低成本。这些设计共同赋...
-
福建高扭矩直流无刷电机
在应用层面,低速直流无刷电机的设计灵活性使其能够适应多样化的需求。通过调整定子绕组结构、磁钢材料或驱动算法,电机可以在宽转速范围内实现平稳的扭矩输出,甚至在极低转速下仍能保持高精度控制。例如,在无人机云台、3D打印机或精密光学设备中,这类电机能够提供无抖动、低振动的运行效果,确保设备的稳定性和成像质量。同时,其无刷结构减少了电磁干扰,适用于对信号纯净度要求较高的场合。在控制方式上,低速直流无刷电机支持PWM调速、闭环反馈控制等多种模式,配合先进的传感器技术,可实现实时速度监测和动态调整。随着物联网和智能控制技术的发展,这类电机正逐步向智能化、网络化方向演进,通过集成通信模块实现远程监控和故障诊...
-
750w直流无刷电机供货报价
直流无刷电机的低维护需求与高可靠性进一步巩固了其市场地位。由于取消了电刷与换向器等易损机械部件,电机运行过程中无需定期更换耗材,维护成本降低约60%,同时避免了因电刷磨损引发的火花、噪音及电磁干扰问题。这一特性使其在医疗设备、精密仪器等对稳定性要求极高的领域得到普遍应用。配合先进的传感器与控制算法,直流无刷电机可实现精确的速度调节与位置控制,响应时间缩短至毫秒级,动态性能远超传统电机。其结构设计的模块化特性也支持快速定制化开发,满足不同场景对转速、扭矩及功率的差异化需求,成为自动化生产线、机器人关节驱动等高级装备的重要动力源。电动轮椅搭载无刷直流电机,操作灵活,方便老年人日常出行。750w直流...
-
西藏直流无刷电机哪个牌子好
直流无刷电机的重要原理在于通过电子换向系统替代传统机械电刷与换向器,实现定子与转子间的磁场精确同步。其定子由硅钢片与三相绕组构成,通电后产生旋转磁场;转子则采用钕铁硼等永磁材料,表面贴装或内嵌式结构形成恒定磁场。当控制器接收霍尔传感器或无传感器算法反馈的转子位置信号时,会通过逆变器(MOSFET/IGBT)将直流电逆变为三相交流电,并按六步换相逻辑依次启动A-B、A-C、B-C等相序组合。例如,在六步换相的第一步中,电流从A相流入、B相流出,定子磁场与转子永磁体形成特定角度差,利用同性相斥、异性相吸原理产生转矩;第二步切换为A相流入、C相流出,磁场方向旋转60°,推动转子持续转动。这种电子换向...
-
600w直流无刷电机生产商家
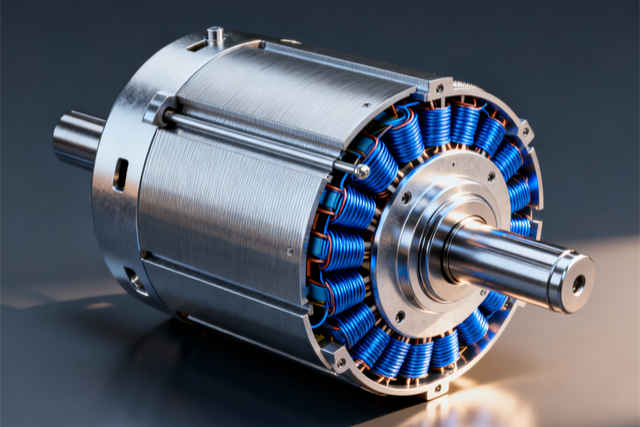
直流无刷电机的内部结构以无刷+电子换向为重要,由定子、转子与位置传感器三大模块精密协作构成。定子作为能量转换的基础,采用硅钢片叠压工艺形成铁芯,其表面开凿的定子槽内嵌有三相星形或三角形连接的电枢绕组。这些绕组通过外部电源直接供电,但电流的通断顺序由电子控制器精确调控,彻底摒弃了传统电刷的机械接触。例如,当控制器根据转子位置信号启动A相与B相绕组时,定子磁场方向会随电流变化而旋转,形成驱动转子转动的虚拟磁极。转子则由高磁能积的永磁体(如钕铁硼)与导磁材料组成,其磁极排列方式直接影响电机性能——表面贴装式(SPM)结构适合高速场景,内嵌式(IPM)结构则能提升低速转矩密度。这种永磁体与导磁材料的组...
-
 郑州外转子直流无刷电机
郑州外转子直流无刷电机随着控制算法与硬件技术的演进,直流无刷电机的控制策略正从传统方波驱动向高精度矢量控制升级。传统六步换向虽结构简单,但存在转矩波动大、低速性能差等问题,而磁场定向控制(FOC)通过坐标变换将三相电流解耦为直轴与交轴分量,分别控制磁通与转矩,实现类似直流电机的动态响应。例如,在工业机器人关节驱动中,FOC算法可结合编码器反馈,将电机转矩波动控制在±1%以内,满足高精度轨迹跟踪需求。此外,无传感器控制技术通过反电动势过零检测或高频信号注入法,省去了物理位置传感器,降低了系统成本与体积,适用于吸尘器、无人机等对空间敏感的场景。当前,全集成驱动芯片已将功率器件、预驱动电路与FOC算法硬件化,进一步简化了...
-
哈尔滨300w直流无刷电机
位置检测与控制策略是三相直流无刷电机实现稳定运行的关键。有感控制方案采用霍尔传感器阵列,通常以120°或60°电角度间隔布置于定子槽间,通过检测转子磁极经过时产生的霍尔电压变化,输出三路正交信号。例如,当转子N极接近A相与B相绕组之间时,霍尔传感器H1输出高电平,控制器据此导通A相下桥臂与B相上桥臂的MOSFET,使电流从A相流入、B相流出,形成定向磁场。无感控制方案则通过反电动势过零检测实现换向,当转子旋转时,悬空相绕组会感应出与转速成正比的反电动势,其过零点对应转子磁极与定子绕组的相对位置。控制器通过比较三相反电动势的过零时刻,推算出转子电角度,进而生成六步换向时序。例如,在高速运行场景中...
-
 郑州直流无刷电机哪家好
郑州直流无刷电机哪家好500W直流无刷电机凭借其高效能与高可靠性,在工业自动化与家用电器领域展现出明显优势。其重要优势源于无刷设计——通过电子换向器替代传统碳刷结构,彻底消除了机械摩擦损耗与电火花风险,使电机效率提升至96%以上,较传统有刷电机节能30%以上。以某型号500W三相无刷电机为例,其采用钕铁硼永磁转子与正弦波驱动技术,在3000转/分钟的高转速下仍能保持低振动(≤1.5mm/s)与低噪音(≤55dB),特别适用于需要持续高速运转的工业场景,如数控机床主轴驱动、自动化生产线物料搬运等。此外,该类电机支持宽电压输入(24V-72V)与无级调速功能,通过配套驱动器可实现转速精确控制(误差≤±0.5%),满足精...
-
乌鲁木齐国产直流无刷电机
高速直流无刷电机凭借其高效能、高可靠性和低维护需求的特点,已成为现代工业与高级消费领域的重要动力部件。相较于传统有刷电机,无刷电机通过电子换向器替代机械电刷,消除了电火花与机械磨损,明显提升了运行效率与寿命。其高速特性得益于永磁转子与优化设计的定子绕组,能够在高转速下保持稳定的转矩输出,尤其适用于需要快速响应和精确控制的场景,如无人机推进系统、工业机器人关节驱动及高性能电动工具。此外,无刷电机的调速范围广,通过改变输入电压或调整驱动算法,可实现从低速高扭到高速低扭的无级变速,满足多工况需求。随着材料科学与控制技术的进步,新型高速无刷电机进一步集成了传感器融合、智能算法与轻量化设计,不仅提升了功...
-
内转子无刷直流电机规格
市场应用层面,国产直流无刷电机已形成覆盖多领域的完整生态链。在新能源汽车领域,其作为驱动电机的重要部件,通过内置式永磁体(IPM)结构与高精度位置传感器,实现95%以上的能量转换效率,支撑车辆在-40℃至85℃极端环境下的稳定运行;在家电行业,变频空调、滚筒洗衣机等产品的普及推动电机需求激增,国产方案通过正弦波驱动技术将噪音降低至30分贝以下,同时通过再生制动功能实现15%的能耗节约;在医疗设备领域,其无火花、防爆特性使其成为人工心脏泵、高速离心机等精密仪器的关键动力模块,通过冗余设计确保连续运行寿命超过5万小时。随着智能制造与绿色能源政策的推进,国产直流无刷电机正加速向模块化、智能化方向演进...
-
福建直流无刷电机规格
在新能源与智能设备快速发展的当下,直流无刷电机的环境适应性优势愈发凸显。其宽电压工作特性(通常覆盖12V-48V直流输入)使其能完美适配太阳能储能系统、电动汽车驱动等波动性电源场景,在30%电压波动范围内仍可保持95%以上的额定扭矩输出。这种特性在分布式能源网络中具有重要价值,例如家庭储能设备在离网状态下,电机能根据电池电量自动调整工作模式,既保证设备正常运转又避免过放损伤。在消费电子领域,无刷电机的小型化与静音特性推动了产品创新,直径20mm以下的微型无刷电机已普遍应用于无人机云台、智能穿戴设备,其运行噪音控制在30dB以下,接近环境底噪水平。更值得关注的是其智能控制接口的标准化发展,通过C...
-
三相直流无刷电机供货报价
150W直流无刷电机凭借其高效、节能、稳定的重要优势,已成为工业自动化与精密设备领域的重要动力源。该功率段电机通过永磁体替代传统励磁绕组,消除了电刷与换向器的机械摩擦,不仅降低了维护成本,更将能量转换效率提升至85%以上,较同功率有刷电机节能约30%。在工业场景中,其0-3000RPM的宽转速范围与1.2N·m的额定扭矩,可精确适配自动化生产线中的精密输送、装配机械等低速重载工况。例如,在数控机床的刀具进给系统中,电机通过矢量控制技术实现微米级定位精度,配合闭环反馈系统动态补偿负载波动,确保加工表面光洁度达到Ra0.8以下。此外,其全密闭结构与钕铁硼永磁体的抗退磁特性,使电机在-20℃至50℃...
-
常州大功率直流无刷电机厂家
消费电子与特种装备领域同样见证着无刷电机的技术渗透。在智能家居场景中,扫地机器人通过双无刷电机驱动系统实现每分钟12000转的高效清扫,配合闭环矢量控制算法,使设备在复杂地形下的避障响应时间缩短至50ms以内。无人机云台采用外转子无刷电机后,三轴稳定系统达到±0.005°的姿态控制精度,即便在8级风环境下仍能保持画面平稳。特种车辆领域,AGV物流车的转向助力系统应用无刷电机后,转向力矩波动降低72%,配合CAN总线通信实现多车协同调度,单台设备日均运输量提升至1200次。在生命科学领域,DNA测序仪的旋转模块采用微型无刷电机后,转速波动率从±2%优化至±0.3%,配合磁编码器实现每转2048脉...
-
300w直流无刷电机供应价格
位置传感器作为直流无刷电机的神经中枢,其精度与响应速度直接决定电机的控制性能。霍尔传感器因其成本低、可靠性高的特点,成为常用的位置检测元件,其通过感知转子永磁体的磁场变化,每60°电角度输出一个方波信号,为控制器提供换向依据。对于高精度应用场景,光电编码器或磁电编码器可输出正交脉冲信号,实现转子角度的微分级检测。而无位置传感器技术则通过监测定子绕组的反电动势波形,间接推算转子位置,这种方案在降低成本的同时,对控制算法的实时性提出了更高要求。此外,电机的机械结构同样经过优化设计,外壳采用导磁材料构建闭合磁路,减少漏磁损耗;深沟球轴承确保转子在高速运转时的稳定性;密封结构则有效防止灰尘侵入,延长电...
-
高压直流无刷电机哪里有卖
消费电子与特种装备领域同样见证着无刷电机的技术渗透。在智能家居场景中,扫地机器人通过双无刷电机驱动系统实现每分钟12000转的高效清扫,配合闭环矢量控制算法,使设备在复杂地形下的避障响应时间缩短至50ms以内。无人机云台采用外转子无刷电机后,三轴稳定系统达到±0.005°的姿态控制精度,即便在8级风环境下仍能保持画面平稳。特种车辆领域,AGV物流车的转向助力系统应用无刷电机后,转向力矩波动降低72%,配合CAN总线通信实现多车协同调度,单台设备日均运输量提升至1200次。在生命科学领域,DNA测序仪的旋转模块采用微型无刷电机后,转速波动率从±2%优化至±0.3%,配合磁编码器实现每转2048脉...