商机详情 -
重庆割草机3D相机打印
高尔夫球场球痕修复依赖人工,存在作业效率低、安全隐患大、修复标准不统一等问题。sparkbot 3D TOF相机为球痕修复机器人提供重要感知支持,选用DT950型号,dToF传感器与全局快门相机融合,可快速识别球道上的球痕破损区域,120°广视角确保无遗漏,5米内高精度定位实现修复沙准确投放。通过雷视融合算法自主规划修复路径,完成投放、压实一体化作业,同时识别人员与车辆,避免碰撞干扰球手正常挥杆。作业完成后可自主返回基站充电、补给,管理人员可实时监控作业进度,大幅降低场地维护成本,提升修复效率与标准化水平sparkbot的3D视觉定位解决方案,整合ToF相机、激光雷达与深度学习识别算法,构建高效分拣定。重庆割草机3D相机打印
数字孪生技术在发展过程中面临多重挑战,包括商业模式成熟度不足、初始投资高昂、用户需求不强、定制化解决方案难以复制、成本高昂等,这些问题限制了其推广和实施。此外,标准化困境也十分明显,目前在数据采集的尺度、参数、格式及周期等方面尚未形成统一标准,导致数据整合和接口对接难度大,技术框架和协议不统一也使项目集成和对接复杂。技术支持方面,数字孪生构建的模型和数据量大,要求计算机硬件具备强大的处理和计算能力,同时对终端设备的高互动、高沉浸和高清晰度展示提出了挑战。数据能力的不足也制约了数字孪生技术的发展,包括数据质量不高、不完整,数据格式和质量差异,以及数据安全和隐私保护等问题。解决这些挑战需要全行业的共同努力和协调。未来,行业内的参与者需共同努力,构建一个开放、共赢的数字孪生生态系统,推动数字孪生技术的健康发展。西安视觉3D相机测绘sparkbot推出的3D视觉检测方案有效解决立体仓库因刚性形变导致的堆垛机误对接失误和卡顿现象。

场景:工业园区、住宅小区园区,存在围栏、路灯、绿化植被、垃圾桶、行人和车辆等障碍物,夜间光照昏暗,白天光照充足,需24小时自主巡逻,避免碰撞行人和设施。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在昼夜不同光照下的局限,实现远距离车辆、围栏的高精度探测与近距离植被、垃圾桶的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建园区三维环境模型,优化系统延迟,应对车辆驶入、行人散步等动态场景,智能适应昼夜光照变化与地面起伏,保障机器人全天候稳定巡逻,提升园区安防效率。
在障碍物感知与规避方面,北极星系列3D激光雷达同样表现优异。3D激光雷达具备近距离补盲能力,可实时识别各类障碍,无论是静态的墙体、立柱,还是动态的行人、车辆。通过精确测算距离与相对速度,安防机器人能够自主调整移动策略,有效避让障碍,在确保自身安全的同时维持巡检任务的连贯执行。此外,该北极星系列3D激光雷达还能实现对人员与物体的准确识别与持续追踪。依托对激光回波信号的分析,机器人可分辨不同目标类型并实时跟踪其运动轨迹。这一功能对于发现行为异常、追踪特定对象具有重要意义。例如,在大型工业园区内,搭载北极星系列3D激光雷达的安防机器人于夜间巡检时,曾准确识别出意图翻越围墙的可疑人员,并立即向管理中心发出预警。期间,机器人自主规避路径上的障碍,快速接近目标区域,为安保人员及时处置争取了宝贵时间。值得强调的是,北极星系列3D激光雷达在低光照、雨雾等恶劣条件下依然能够稳定运行,不易受环境干扰,从而保障安防机器人在多样复杂场景中持续发挥效能。3D 视觉相机采用d tof原理设计,探测距离可达 38.4m,适用于无人机的空间三维测绘与建模、。

在施工现场进度监控中,构建完整的3D数字孪生模型是突破传统监控方式局限的关键,可有效弥补传统地面激光扫描与摄影测量技术需大量扫描作业的不足,提升监控效率与准确度。传统技术依赖密集扫描获取现场数据,不*可耗时费力,还易因扫描盲区导致数据不完整,影响进度分析的准确性。 3D ToF相机传感器凭借其高效的数据采集能力,成为数字孪生模型构建的重要支撑。其获取的3D数据可通过两种关键方式,实现与其他传感器数据的准确对齐和集成:一是借助机器可读标记检测,快速定位各传感器数据的空间位置;二是通过匹配每个传感器所获图像的特征点,进行额外的重新定位校准,确保多源数据在数字孪生模型中实现无缝融合。 整合后的多源数据的数字孪生模型,能够实时映射施工现场的实际状态,动态更新施工进度,便于管理人员直观掌握施工节点推进情况,及时发现进度偏差并优化调整,为施工现场进度管控提供科学、高效的技术支撑。全文严格控制字数,聚焦重要技术与应用价值,贴合实际工程需求。3D TOF相机可高效应用于工业园区周界安防,解决传统周界防护误报率高、夜间防护薄弱的痛点。苏州工业3D相机导航
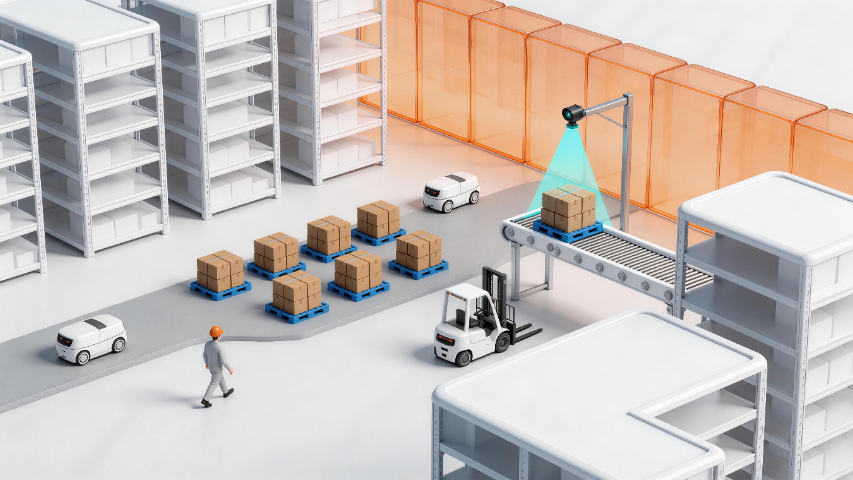
基于3D视觉传感器,sparkbot推出了人工叉车识别系统与库位状态识别系统,为仓储物流提供一体化。重庆割草机3D相机打印
教育实训机器人搭载3D激光雷达,为机器人教学、实训提供准确感知支撑。其小巧轻便的设计搭配360°视场角,可实现室内外环境的准确感知,支持建图、导航、避障等实训项目。20万点/秒的点云速率,能快速生成实训场景3D地图,配合ROS操作系统,可实现路径规划、障碍物识别等算法的实操教学。≤3cm的测距精度,确保机器人准确执行实训指令,避免碰撞实训设备与人员。激光雷达支持多种算法适配,可满足不同阶段的教学需求,帮助学生直观理解机器人感知技术,提升实操能力。重庆割草机3D相机打印
杭州星火博特科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在浙江省等地区的电子元器件中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的服务理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来杭州星火博特科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!