商机详情 -
武汉移动机器人3D激光雷达测量
从预设到智能,3D激光雷达解锁机器人自主决策能力 2026马年春晚,魔法原子机器人的三次登台,不只是一场视觉盛宴,更是具身智能技术的生动展示。从高难度的舞台表演到充满烟火气的日常服务,机器人之所以能出色完成各项任务,关键在于3D激光雷达赋予的强大感知能力。传统机器人的局限的在于感知维度单一,只能通过预设程序应对固定场景,一旦环境发生变化便易出现失误。3D激光雷达的应用,将感知维度从2D提升至3D,不只能准确识别障碍物距离,更能细致描绘环境立体轮廓,助力机器人自主完成建图与定位,无需改造场景即可快速适配春晚复杂的舞台环境。其可随时间积分提升的角分辨率,能准确捕捉面条、透明玻璃杯等细小物体,避免误判,为机器人调整动作、规避风险提供可靠数据,让机器人真正实现“懂场景、会决策”,打破了传统机器人的应用局限。依托高精度探测能力,半球形激光雷达为数字孪生模型提供精细数据支撑。武汉移动机器人3D激光雷达测量
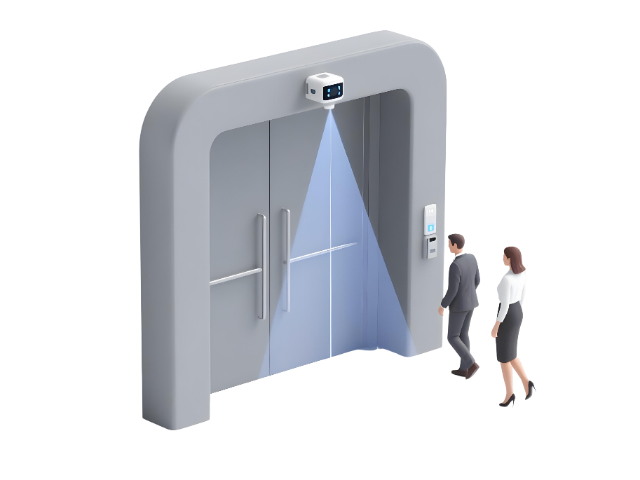
首先,在环境感知方面,半球形3D激光雷达能够为 AMR 提供准确的周围环境信息。通过发射红外光并接收反射回来的信号,半球形3D激光雷达可以快速构建出 AMR 工作区域的三维点云图,包括障碍物的位置、形状和尺寸等。这使得 AMR 能够在复杂的仓库环境中自如穿梭,避开货架、人员和其他移动设备,确保运行的安全与稳定。 其次,半球形3D激光雷达在 AMR 的路径规划和导航中发挥着关键作用。基于实时获取的环境数据,AMR 可以利用半球形3D激光雷达信息制定合理的行驶路径。无论是在狭窄的通道还是拥挤的货物存储区,AMR 都能根据环境的变化动态调整路径,实现高效、准确的货物搬运。 此外,半球形3D激光雷达还极大地提高了 AMR 的定位精度。在没有固定导航标识的情况下,AMR 依靠半球形3D激光雷达对周围环境特征的识别和匹配,能够实现厘米级的定位。这对于需要准确到达指定位置进行货物装卸和存储的 AMR 来说,至关重要。郑州3D激光雷达测量用于地形地貌测绘,半球形3D激光雷达抗干扰性强,适配复杂户外测绘场景。
感知系统作为无人物流车的关键决策支撑,其性能直接决定车辆运行安全性与智能决策水平,3D激光雷达的应用实现了感知系统的质的飞跃。部分车型采用双3D激光雷达嵌入式部署方案,凭借极小探测盲区与紧凑型结构设计,实现全场景无盲区覆盖,大幅提升对低矮障碍物、突发近距离目标的探测精度,为低速复杂场景下的安全行驶提供保障。 该设备具备优异的主动抗串扰能力,可在多车协同作业、激光信号交织的复杂场景中稳定运行,规避信号干扰引发的误判、漏检问题,增强系统鲁棒性。相较于传统单线雷达,其在地图构建效率、场景泛化能力上优势明显,高频数据采集与低延时处理特性,进一步强化对细小障碍物的识别能力,夯实无人物流车安全运行基础。
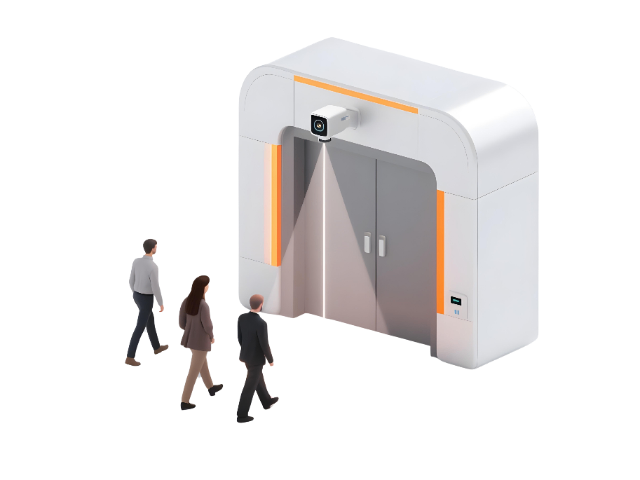
主动抗串扰与轻巧身躯,适配多元场景 半球形3D激光雷达具备主动抗串扰与轻巧身躯两大优势,适配多场景作业需求。在大型庭院、公共草坪等多台机器人协同作业场景中,其抗干扰设计可避免信号混乱,确保每台机器人准确获取环境信息,杜绝相互碰撞,保障作业有序。同时,它在兼顾强大性能的同时体积小巧,可嵌入式安装,既不破坏机器人外观一体化设计,符合现代审美,又能保护设备免受碰撞、恶劣天气等外界因素损坏,进一步提升机器人的实用性与耐用性。救援无人机通过该雷达绕障,在灾害现场低空飞行,精细定位被困人员与危险区域。
不惧暗光、强光等复杂环境 保障机器人从容作业 行业应用作业时间覆盖白天黑夜,现场光线条件多变且不可控。 3D 激光雷达不受无光、弱光、闪频等条件影响,即便是复杂多变的环境,依然可以感知足够的点云信息,辅助机器人进行导航、避障,甚至是进行检测分类,充分释放机器人工智能的潜力。在电力巡检中,机器人凭借着高精度自主导航,可自主采集信息,实时上传;在应急救援中,机器人可轻松跨越障碍与物体,在废墟、碎石等复杂环境中行动自如;在金属冶炼中,轻松穿越复杂工业结构,减少巡检人员暴露在潜在危险中。清扫机器人搭载该雷达,实现全场景立体避障,规避桌椅、墙角等障碍物,清洁无死角。郑州3D激光雷达测量
农田地形测绘采用半球形激光雷达,高效采集地形数据,助力农业数字孪生。武汉移动机器人3D激光雷达测量
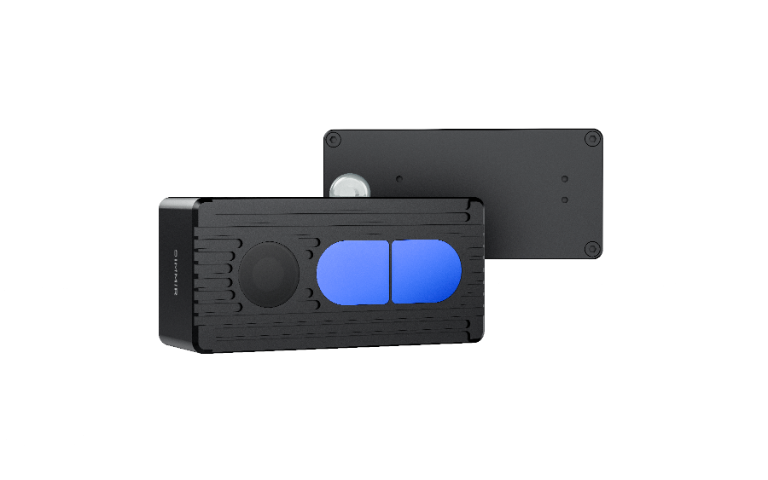
三维激光扫描技术,也称“实景复制技术”,它能够快速、准确地获取被测对象表面的三维坐标数据,并以可视化的点云形式展现出来, 具有效率高、精度高、完整度高的优势。随着技术的发展和完善,三维激光扫描技术的相关产品逐渐丰富,并被广泛应用于各行各业。sparkbot的Polaris 北极星系列半球形固态3D激光雷达, 为室内外场景的测绘工作提供了高效、高精度的三维建模解决方案。并且可集成激光雷达、可见光相机和 RTK 等多个模块,能够快速处理海量的点云和可见光影像数据。在外业现场,测绘人员完成扫描后,可实时预览扫描结果,确保数据的完整性,避免返工。三维激光扫描仪,为实现三维模型重建提供了一种全新的技术手段。而3D激光雷达作为手持扫描仪的较为重要模组之一,不只体积小巧,而且具备超广 FOV 、密集点云等众多优势,助力高效获取高精度的测绘成果,为用户降本增效。武汉移动机器人3D激光雷达测量
杭州星火博特科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在浙江省等地区的机器人视觉传感器中汇聚了大量的人脉以及市场口碑,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同杭州星火博特科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!