商机详情 -
莆田钢筋混凝土管道检测与评估施工
管道检测修复主要包含以下两个方面:1、功能性检测:管道检测修复的排水管道功能性检测主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。2、结构性检测:管道检测修复的排水管道结构性检测主要是以检查管道材料结构现状为目的的检测,这类检测主要了解管道的结构现状以及连接状况,通过综合评估后确定管道给地下水资源及市政设施是否带来影响。对于这类结构性问题被检测出来后一般需要通过管道检测修复的手段来解决。市政雨污水管道脱节问题请找江苏振祺建设工程有限公司。莆田钢筋混凝土管道检测与评估施工

工作环境要求:1、积水面积质量可靠的CCTV管道检测机器人的外部防护防水等级较高,可以应对基本的浸水作业,但是如果长时间侵泡在水中进行检测工作,可能不能达到理想的效果,检测的结果和实际情况有偏差,另一方面还会对CCTV管道检测机器人内部零件造成损伤,减少使用寿命,因此机器人在检测管道前要了解管道底部的过水面积,超过一定的范围是不允许进行作业的。2、前近距离一般情况下,比较好的CCTV管道检测机器人的标准前进距离为120米,如果有特殊要求,可以定制线缆将其拓展到300米宿迁开挖修复管道检测与评估大概费用破裂3级:金属管道变形小于管道直径的15%。

管道机器人设备在实施检测的过程中,应根据规范要求操作设备,在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。管道机器人设备在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。
管道机器人设备在实施检测的过程中,应根据规范要求操作设备,在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。管道机器人设备在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。管道CCTV检测系统,通过爬行器在管道内爬行,对管道内的管道接口问题等缺陷进行摄像和评估。
管道高清潜望镜的性能优势:一体化轻量设计潜望镜机体、操作杆、延长杆和支撑标尺一体化轻量设计,无需现场安装,提高检测效率。设备整体重量减轻,操作杆抗压强度是普通材料的10倍。无线高清传输采用无线高清传输技术,传输过程稳定,在各种复杂网络工况下保持流畅运行。高亮照明光源分布更为均匀、灯杯升级,光源亮度更高、照射距离更远,成像更清晰。数字高清200万像素高清摄像头,超大俯仰角度,具有一键除雾、自动水平等功能。接口严重,相接的两个管口偏差在管壁厚度的1-2倍之间。嘉兴雨水管道检测与评估有哪些
接口中度,相接的两个管口偏差在管壁厚度的1/2-1倍之间,管道内外没有物质连通迹象。莆田钢筋混凝土管道检测与评估施工
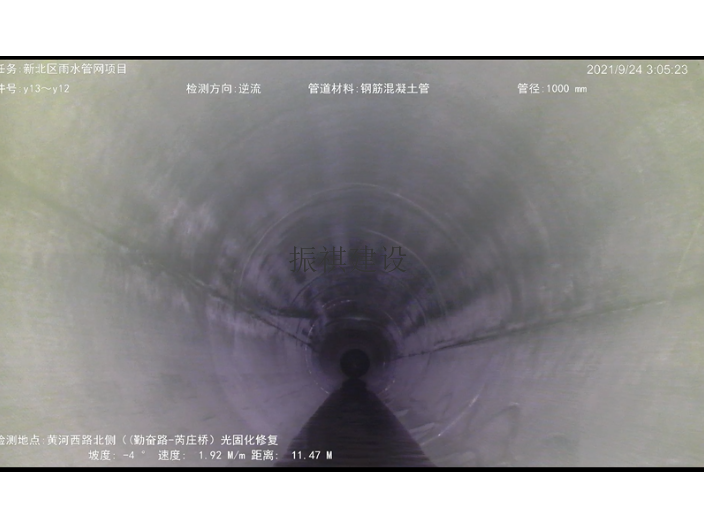
管道无损检测指的是通过使用一些先进的检测设备检测出管道存在的缺陷问题,如管道CCTV检测机器人、QV视频检测仪、声呐检测仪等高科技产品能够很好的完成城市地下排水管道破损检测的工作,CCTV检测机器人能在井下360°无死角录像和拍照,并实时回传画面到地面控制端。QV视频检测仪可以获得高清晰度管道内部图像信息,同时也可以再搭载激光测距模块去测量缺陷所在位置离井口的距离。声呐检测仪可以在管道处于满水或半管水状态,且不具备排干条件时,通过整合采集的数据,计算出管道的三维模型,展示给作业人员。通过这些设备和配合现场作业人员,能以更快的速度发现管内存在的问题,为修复、疏通、清洗管道方案的确定提供可靠依据,并为管道施工竣工验收、接管状况提供科学有效的依据。
莆田钢筋混凝土管道检测与评估施工