商机详情 -
淮南开挖修复管道检测与评估是什么
CCTV检测仪装备有先进的摄像头、爬行器及灯光系统,完全由带遥控操纵杆的监视器控制,操作简单,移动方便。可以进行影像处理、记录摄像头的旋转和定位。具有高质量的图像记录和文字编辑功能。其主要工作部分为一部四轮驱动的摄像小车和一台计算机。根据不同管径,可以选用不同型号的CCTV。通过它能够将管道中的情况一览无余。在项目中对管内情况实在无法得知的时候,便采用此设备对管段进行检查。CCTV检测仪装备有**的摄像头、爬行器及灯光系统,完全由带遥控操纵杆的监视器控制,操作简单,移动方便。可以进行影像处理、记录摄像头的旋转和定位。具有高质量的图像记录和文字编辑功能。其主要工作部分为一部四轮驱动的摄像小车和一台计算机。根据不同管径,可以选用不同型号的CCTV。通过它能够将管道中的情况一览无余。在项目中对管内情况实在无法得知的时候,便采用此设备对管段进行检查。数据采集:采集排水管道的材质、管径、断面形状、壁厚及运行情况等信息。淮南开挖修复管道检测与评估是什么
1、使用CCTV管道检测,减少了工人下井作业的危险性。人员可一直在安全的位置远程操控机器人,即可根据机器人拍摄的影像资料,对管道内部存在的问题进行详细的位置确定、缺陷性质的判断。2、CCTV管道检测是采用内窥闭路电视检测系统,安装在管道机器人上,实现在管道内控制爬行,对管道内部进行摄影检测,如腐蚀、穿孔、锈层、裂纹等情况,然后根据管道情况出具评估报告,从而为修复方案提供了重要依据。3、管道CCTV机器人的适用管径范围为直径300毫米以上,操作方便,实用性强,摄像头高度可自由调节,镜头360度自由旋转,可自行测量管道的长度,明确管道的损坏位置可将必要的信息输入在画面及留档保存。淮南开挖修复管道检测与评估是什么管道检测修复主要包含以下两个方面:1、功能性检测,2、结构性检测。

据管道机器人的不同驱动模式,大致可以分为八种。种是流动式机器人,这类机器人没有驱动装置,只是随着管内流体流动,属于不需要消耗能源的被动型机器人,但是其运动模式相当有限。第二种是轮式机器人,这一类机器人***运用于管道检查工作,许多的商业机器人就是这一类型。第三种是履带式机器人,即用履带代替轮子。第四种是腹壁式机器人,这类机器人通过可以伸张的机械臂紧贴管道内壁,推动机器人前进。第五种是行走式机器人,这类机器人通过机械足运动,但是这类机器人需要大量驱动器,并且难以控制。第六种是蠕动式机器人,这类机器人像蚯蚓一样通过身体的伸缩前进。第七种是螺旋驱动式,即驱动机构做旋转运动,螺旋前进。第八种是蛇型机器人,这类机器人有许多关节,像蛇一样前行。
CCTV管道检测机器人使用时应注意哪些事项?1、每次施工完毕后需对检测机器人车体进行清理,需用湿毛巾或清水对设备表面进行擦拭,并用刮刀剔除镜头夹缝中的积泥砂石,以免影响镜头转动。2、设备下井时,应避免车体尾部线缆与井口、管壁发生摩擦导致线缆破损,线缆不能强拉硬拽。(建议在检测机器人尾部套入PVC水管弯头或购买导向轮,用于保护线缆)。3、每拍摄一段视频的间隙,需停顿数3-5秒,至片尾画面结束,避免主控电脑出现卡屏死机现象。4、拍摄过程中,如遇坑洼泥泞,管道脱节等检测机器人无法继续向前时,必须停止向前,以免检测机器人卡入井内无法取出。市政管道CCTV专业检测单位:江苏振祺建设工程有限公司。

透**达法:原理:根据电磁波在地下通信过程中的反射原理,可以反映不同对象的接口。优缺点:适用于对土层中的空隙深度和大小进行测量,能够确定饱和水渗透的范围和管道。但是输出的图像十分复杂,需要要经验十分丰富的人才能判断问题所在。撞击回声法:原理:当重物或锤击时,应力波就会产生,然后经过管道传播,地下的装置能够产生反射波和内部的裂纹。优缺点:*适用于混凝土管和专管的大口径排空的检测。表面波光谱分析法:原理:利用一个有辅助功能的传感器以及能够对表面波进行分析的频谱分析仪,来对管壁和管壁四周的土壤进行分析,从而将土壤条件和管壁的位置检测出来。上面所说的四种管道外的检测技术都是利用仪器来实现对于雨污水管道的检测,在对管道进行检测时对管道不会造成任何损害,而且相对于人工检查来说,安全系数更高。雨水管道破损请找江苏振祺建设工程有限公司。厦门管道检测与评估联系人
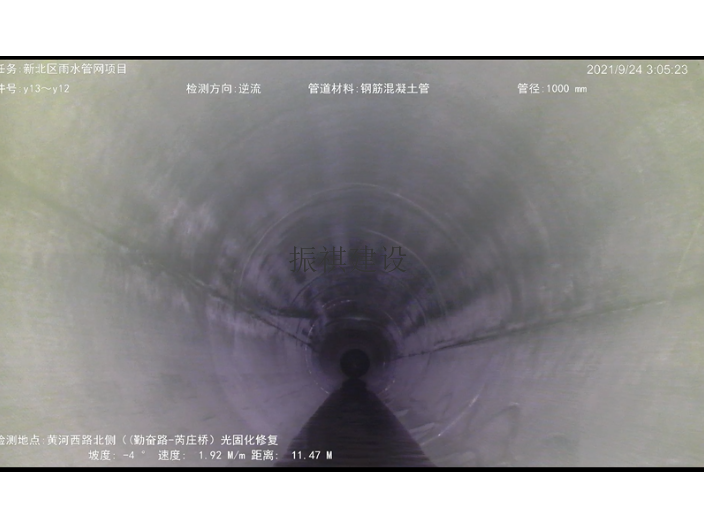
CCTV作为一种新型的管道检测方式,被用在市政管道、箱涵、隧道等领域。淮南开挖修复管道检测与评估是什么
什么是管道检测爬行机器人?管道检测爬行机器人是一种特殊的机器人,它可以在管道内进行检测和检修工作。它可以在管道内爬行,并使用摄像头和传感器来检测管道内的情况,以及管道内的温度、压力和湿度等参数。它还可以检测管道内的漏洞、裂缝和其他缺陷,并可以提供管道内的清洁和修复服务。管道检测爬行机器人可以提高管道检测和维护的效率,减少人工检测和维护的成本,提高管道的安全性和可靠性。目前管道检测爬行机器人应用面广。淮南开挖修复管道检测与评估是什么