商机详情 -
中国澳门协作机器人力控检测
在现代制造业中,电机齿轮的装配精度直接关系到电机的运行效率与寿命。达宽科技的机器人力控系统为这一关键环节带来了性的变革。机器人力控通过高精度的六维力传感器,实时监测装配过程中齿轮与轴之间的微小受力变化。当机械臂将齿轮缓缓套入电机轴时,力控系统能够敏锐地感知力变化,并调整机械臂的姿态和力度。这种基于物理反馈的装配方式,彻底改变了传统依赖固定程序和示教点的机器人作业模式。操作人员只需在系统中设定合理的力矩范围和位移参数,机器人便能像经验丰富的技师一样,灵活应对齿轮个体差异带来的装配挑战。相比传统装配方案,力控系统大幅减少了因力度不当导致的齿轮磕碰和轴的磨损,每一次啮合都恰到好处,从而提升了装配成功率,让电机齿轮的装配过程更加流畅、高效,为制造业带来全新的智能化装配体验。达宽的解决方案融合先进机器人力控,推动产线自动化水平向上发展。中国澳门协作机器人力控检测

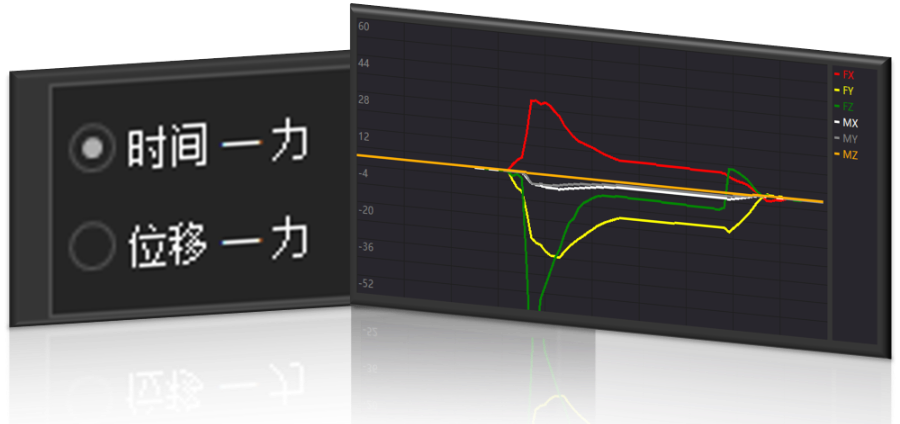
在效率提升方面,机器人力控技术为齿轮装配注入新动能。传统机器人装配齿轮时,操作人员需反复校准齿轮位置、试探啮合力度,不仅耗时,还易因操作节奏不一致影响整体进度。机器人力控能够通过实时力值反馈快速判断装配状态,自动调整机器人的动作轨迹与接触力度,减少无效操作。达宽科技针对齿轮装配场景优化的机器人力控方案,提升了力控响应的及时性与动作协调性,让机器人在抓取、对位到终啮合的全流程中保持连贯作业节奏,减少不必要的停顿与调整时间,帮助企业在相同时间内完成更多装配任务,提升整体生产效率。中国澳门协作机器人力控检测达宽科技机器人力控配备可视化界面,简化工艺参数设置流程。

电机齿轮装配对位置精度和配合力有着严格要求。机器人力控技术为解决这一难题提供了有效途径。在齿轮轴孔配合环节,机器人力控系统能够实时感知接触状态,通过柔顺控制自动调整机械臂的位姿和出力。达宽科技开发的机器人力控方案,采用高灵敏度力觉传感与动态响应算法,确保齿轮齿槽与轴齿在接触瞬间实现自适应引导。操作人员设定好目标接触力范围后,机器人力控系统即可自主完成精细的导入过程,有效避免传统硬性装配可能产生的齿面压痕或配合偏差。这种基于力觉反馈的智能装配方式,提升了微小间隙配合的成功率,为用户带来了更顺畅的装配体验。
生产安全性在电机齿轮装配场景中尤为重要,机器人力控为其增添安全保障。装配过程中,若出现齿轮卡滞、定位偏差等异常情况,传统机器人可能因持续施力造成齿轮崩裂、电机轴弯曲等设备损坏。达宽科技的机器人力控系统具备实时异常识别功能,当监测到力值超出安全范围时,会立即触发保护机制,控制机器人暂停动作或退回安全位置。这一机制不仅保护了精密的电机齿轮零件和装配设备,也减少了因故障导致的生产中断,为操作人员营造更安全的作业环境。达宽的机器人力控方案,为提升线束装配效率和质量铺就技术道路。
达宽科技为齿轮装配场景提供端到端的机器人力控解决方案。其技术在于将高精度力传感器、动态控制算法与工艺深度整合,形成自适应装配系统。在实际应用中,该方案可无缝接入主流工业机器人平台,通过开放式接口与MES系统交互生产数据。在减速器制造领域,达宽科技机器人力控系统实时记录每个齿轮的压装曲线并自动生成质量报告。这种深度集成不仅优化了装配工艺,更为制程追溯提供数据支撑。达宽科技专业团队提供全周期技术支持,确保机器人力控系统持续创造价值。用户利用达宽科技机器人力控,可实现稳定连续的装配作业,提高产出。中国澳门协作机器人力控检测
达宽科技持续优化机器人力控,为电子制造提供更优的自动化装配体验。中国澳门协作机器人力控检测
展望未来,达宽科技的机器人力控系统将继续推动电机齿轮装配技术向更高层次发展。随着工业物联网技术的不断进步,力控系统将与生产数据管理系统深度融合。在装配电机齿轮的过程中,力控系统采集到的每一次受力数据、每一个位移参数都将被保存。这些海量数据经过分析和挖掘,能够为工艺工程师提供宝贵的信息资源。工程师可以根据数据分析结果,进一步优化力控参数,完善装配工艺流程,使装配过程更加高效、精细。此外,力控系统还将与机器人视觉技术协同发展,通过视觉定位与力控装配的有机结合,进一步提高装配的精度和可靠性。达宽科技始终致力于将机器人力控技术打造成为电机齿轮装配领域的智能引擎,助力制造业实现从传统自动化向智能化制造的跨越升级,开启电机传动部件装配的全新智能化时代。中国澳门协作机器人力控检测