商机详情 -
四川协作机器人力控使用方法
机器人力控还可以与其他智能化系统进行深度集成,实现更为复杂的任务调度和协同工作。在多机器人协同作业时,力控技术可以协调各个机器人的力量,确保任务的顺利完成,进一步提高了自动化系统的整体效率。总的来说,机器人力控技术的应用不仅带来了生产效率和安全性的提升,还为企业带来了更多的创新机会。作为行业中的佼佼者,达宽科技凭借其先进的机器人力控解决方案,为全球制造业提供了强大的技术支持,帮助更多企业实现了自动化转型和智能化升级。机器人力控系统让企业在生产中依然保持高效,达宽科技的技术确保生产流程畅通无阻。四川协作机器人力控使用方法
机器人力控不仅限于硬件上的技术提升,它在操作界面的智能化方面也有很大进展。随着机器人技术的发展,越来越多的企业开始使用智能化的操作界面来监控和控制生产过程。机器人力控技术集成了先进的数据采集与分析系统,使得操作人员可以实时监测机器人的工作状态,及时调整和优化操作策略。这不仅降低了操作难度,还提高了生产管理的效率和准确性。达宽科技的机器人力控解决方案通过简化操作流程,提供直观易懂的操作界面,使得生产过程中对机器人的控制更加便捷,为企业提升了生产过程中的智能化水平。天津机器人力控使用方法机器人力控技术有效地提升了生产的稳定性,达宽科技的方案助力企业减少了意外停机的风险。

汽车线束装配是电气系统和机械系统连接的关键环节,其精确度和可靠性直接影响终产品的性能。随着工业自动化技术的进步,机器人在线束装配领域的应用日渐增多。但是,对于自动化厂商,传统机器人装配在精确控制力度和位置方面仍存在不足,进而影响品控。车辆线束系统中的线束长度可达数公里。因此,在工业4.0的浪潮、企业追求降本增效的大环境中,众多汽车生产厂商,都在追求汽车线束更高效率、稳定性更好、良品率更高的组装方式。那怎么让线束装配在保证效率的前提下,提高装配质量和良品率呢?现代工业机器人装备了高精度的伺服电机和精密的传动系统,能够实现亚毫米级别的运动精度。然而,机器人在精确控制力度和位置方面仍存在不足。且线束的接口比较脆弱,容易损坏。且装配过程中可能出现的微小偏差和不规则性,例如线材的弯曲或配件的尺寸差异。为了应对这些问题,达宽科技在多家汽车厂家的项目中,采取了机器人力控方案。
达宽科技的机器人力控系统具备强大的负载辨识能力,无论重量大小、形状各异,不同材质,都能够精确计算并识别末端负载的重量和重心参数。这一功能确保了在自动化流程中对负载的精确控制和调整。针对同一末端负载,我们的软件支持在多种工况下进行力控调节,以适应不同的操作需求。无论是常规作业还是特殊应用场景,都能实现精确的力控调节。该机器人力控系统软件以其强大的兼容性而著称,能够实时准确地读取来自不同品牌的力传感器数据,确保控制的精确性和智能化。此外,该软件还能与包括ABB、KUKA、FANUC、新松等众多品牌及型号的机器人实现实时通讯。无论是工业机械臂还是协作机器人,它都能实时读取数据,以实现强大化的协同作业。机器人力控技术使得机器人操作更为精确,达宽科技的解决方案帮助企业提升生产质量,确保每件产品一致。

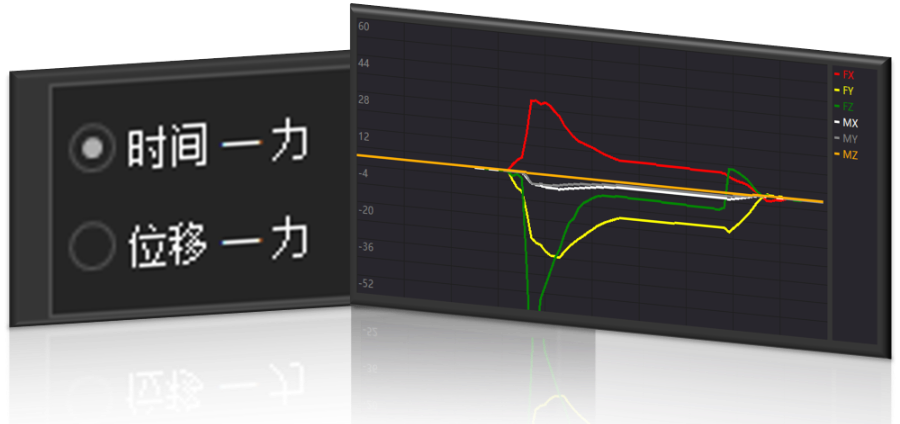
机器人力控技术,也称为力反馈控制技术,是指在机器人的操作过程中,通过将传感器检测到的力或力矩信息,反馈到控制系统,通过力控算法的解算,进而调整机器人的动作,以实现精确力控制的一种技术。想象一下,如果你的手能感觉到每一个细微的触感,并根据这些触感调整动作,这就是力控技术想要达到的效果。机器人力控技术的主要原理可以概括为以下几个步骤:1,力觉感知:利用力传感器检测机器人与外界环境的交互力。2,信号处理:将感知到的力信号进行一系列的滤波处理,去除一些不必要的噪音,然后将信号传输到控制系统。3,控制决策:根据信号和预设的控制算法,计算规划出机器人下一步的动作。4,执行动作:将控制指令传递给机器人的执行机构,实现精确的动作调整。通过机器人力控,达宽科技帮助企业提升了生产线的安全性和稳定性,降低了停机风险。中国台湾协作机器人力控原理
机器人力控在精细化操作中展现出性能,达宽科技的创新方案让制造流程更加安全高效。四川协作机器人力控使用方法
达宽机器人力控系统采用力位混合判断技术,并引入超限报警机制,将力和位移设置两级报警阈值。同时,设置线束装配成功时的力和位移判断依据。这解决了如何判断装配成功,如何判断失败,如何保护连接器的问题。接下来,我们需要关注如何优化装配过程,以应对微小偏差和不规则性,从而提高产品的合格率。面对装配过程中,线束这类可能出现的微小偏差和不规则性的工件,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术依托六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少干扰外力,从而让接口能够准确对接。同时,在装配过程中,该技术通过调整机器人的位置和姿态,减少干扰外力,防止因某一角度装配时干扰外力过大而装配失败。四川协作机器人力控使用方法