商机详情 -
甘肃机器人力控监测
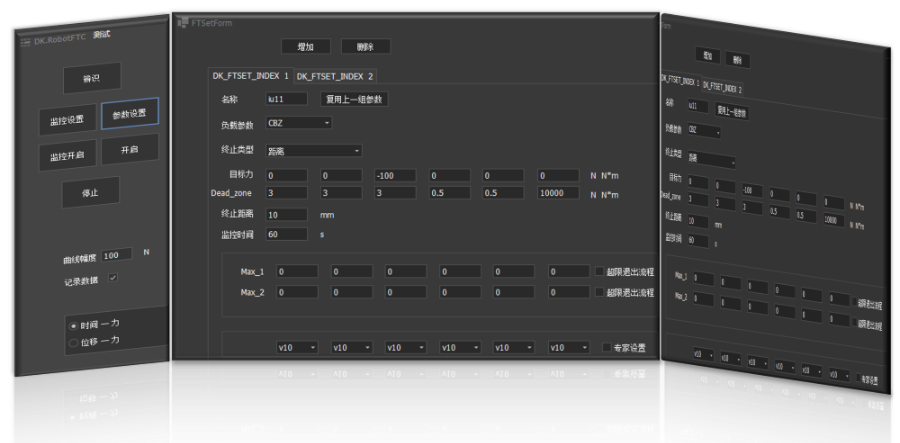
达宽科技的机器人力控系统软件支持两种的补偿类型,提供全方面的运动参数设置,覆盖六个自由度,确保机器人在各种操作环境中都能实现精确控制。通过读取力传感器数据,软件使得机器人能够实时调整位置和姿态,确保作业过程的精确和稳定。达宽科技的机器人力控软件具有位移-力和时间-力两种监控模式。通过实时力位监测技术,实时捕捉力和位置的微小变化,确保装配过程中的每一个动作都达到毫厘之精,同时可以及早识别、纠正和响应过程中的异常,提供了更高的装配精度和控制能力。通过持续监测,能够预防和减少因力位误差导致的质量问题,从而保证长期稳定的高质量输出。借助机器人力控,达宽科技优化了生产过程,帮助企业节省时间,提高工作效率和产品质量。甘肃机器人力控监测

在制造业中,节省时间和降低成本是提升企业竞争力的关键因素之一。机器人力控技术通过高效的自动化操作,帮助企业减少人工干预,从而降低了人力成本和生产时间。机器人力控能够持续高效地完成长时间工作任务,且不受疲劳影响,极大地提升了生产线的稳定性。通过智能化的力控制系统,机器人在执行任务时能够自动调整施力,避免了错误操作和浪费,从而进一步节省了原材料和能源成本。达宽科技的机器人力控解决方案,凭借其高效的智能调节能力,帮助客户提升了生产效率,降低了运营成本,为企业带来了更大的经济效益。陕西工业机器人力控推广达宽科技的机器人力控技术提升了工作环境的安全性,确保机器人任务的顺利执行。
达宽机器人力控系统采用力位混合判断技术,并引入超限报警机制,将力和位移设置两级报警阈值。同时,设置线束装配成功时的力和位移判断依据。这解决了如何判断装配成功,如何判断失败,如何保护连接器的问题。接下来,我们需要关注如何优化装配过程,以应对微小偏差和不规则性,从而提高产品的合格率。面对装配过程中,线束这类可能出现的微小偏差和不规则性的工件,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术依托六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少干扰外力,从而让接口能够准确对接。同时,在装配过程中,该技术通过调整机器人的位置和姿态,减少干扰外力,防止因某一角度装配时干扰外力过大而装配失败。
机器人力控技术,也称为力反馈控制技术,是指在机器人的操作过程中,通过将传感器检测到的力或力矩信息,反馈到控制系统,通过力控算法的解算,进而调整机器人的动作,以实现精确力控制的一种技术。想象一下,如果你的手能感觉到每一个细微的触感,并根据这些触感调整动作,这就是力控技术想要达到的效果。机器人力控技术的主要原理可以概括为以下几个步骤:1,力觉感知:利用力传感器检测机器人与外界环境的交互力。2,信号处理:将感知到的力信号进行一系列的滤波处理,去除一些不必要的噪音,然后将信号传输到控制系统。3,控制决策:根据信号和预设的控制算法,计算规划出机器人下一步的动作。4,执行动作:将控制指令传递给机器人的执行机构,实现精确的动作调整。机器人力控在精细化操作中展现出性能,达宽科技的创新方案让制造流程更加安全高效。

随着市场需求的变化,小批量、高效生产成为了许多企业的新需求。机器人力控技术在这方面发挥着不可忽视的作用。通过精细的力控制,机器人能够灵活适应不同批量的生产要求,不仅能快速切换任务,还能保持高效率和高精度。与传统的流水线生产相比,机器人力控技术能够高效支持小批量、多品种的生产任务,这使得企业能够灵活应对市场变化,并减少库存积压。达宽科技提供的机器人力控技术,可以帮助企业快速响应市场需求,进行灵活定制化生产,同时保证高效和稳定的产出。达宽科技的机器人力控系统帮助企业实现了更高效的生产流程,提升了整体工作效率和生产可靠性。福建机器人力控检测
借助机器人力控,达宽科技帮助企业优化生产节奏,减少了不必要的生产环节,提升了生产效率。甘肃机器人力控监测
达宽科技的机器人力控软件配备了灵活的超限报警功能,允许用户针对每个监测方向设定两级报警阈值。此外,软件拥有超限自动退出功能。一旦监测到超出设定的安全值,系统不仅会发出警报信号,还将自动中断装配流程,确保传感器和工件的安全。该软件提供了一个高度灵活的参数管理系统,内置了多组力控参数和负载辨识参数的保存功能。用户可以为每组参数设定个性化的终止条件,以满足特定应用场景的需求。此外,我们的系统允许多组力控参数调用同一个负载参数设置,简化了配置过程,同时确保了在力控调节过程中对负载特性的一致性理解,无论面对何种工况变化,都能快速适应。甘肃机器人力控监测