商机详情 -
新疆工业机器人力控监测
随着PCBA生产线的规模不断扩大和装配工艺性能的提升,PCBA线束的装配质量和效率变得越来越重要。PCBA线束装配已经成为提升电子制造生产效率和产品质量的关键,其精确度和可靠性直接影响电子产品的性能。在传统人工装配过程中,PCBA线束组装既耗时又费力,且易受人为因素影响,从而影响装配质量和效率的稳定性。随着工业自动化技术的进步,机器人在线束装配领域的应用日渐增多。然而,机器人在精确控制力度和位置方面仍存在不足。为了确保每个连接点都达到高标准的质量要求,力控技术的引入显得尤为重要。力控技术让机器人能够在高精度、高速度的条件下,完成复杂的线束装配任务,减少人为干预,提高生产效率和产品质量。达宽科技的机器人力控系统已成功落地多家头部汽车电子、工控机、服务器厂家,助力其精密装配过程的自动化、智能化、数字化改造。借助达宽科技的机器人力控技术,用户能够提高产品的一致性和精度,确保生产质量稳定可靠。新疆工业机器人力控监测
机器人力控技术通过精确控制机器人的作用力和运动轨迹,显著提高了生产效率和产品质量。达宽科技的力控系统具备强大的负载辨识能力,能够精确计算并识别末端负载的重量和重心参数,确保在自动化流程中对负载的精确控制。此外,系统支持在多种工况下进行力控调节,无论是常规作业还是特殊应用场景,都能实现一致性的力控调节。这种高精度的控制能力有效减少了因力位误差导致的质量问题,从而保证了长期稳定的高质量输出。
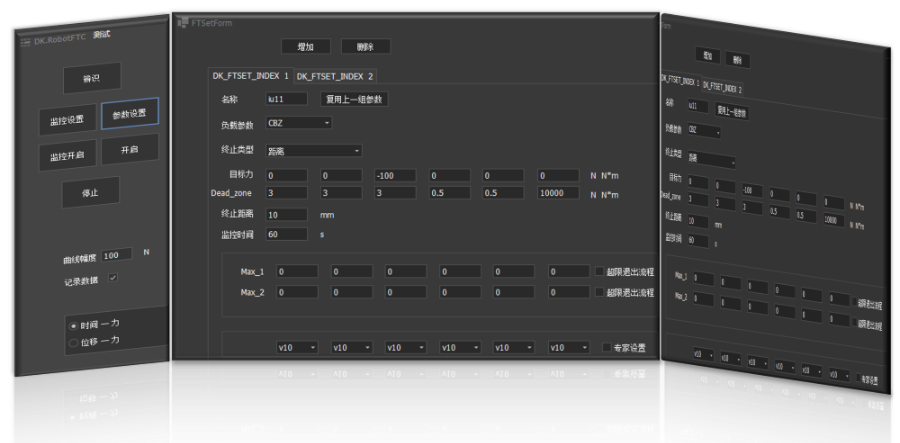
在人机协作场景中,安全始终是首要考虑因素。达宽科技的机器人力控系统配备了灵活的超限报警功能,允许用户针对每个监测方向设定两级报警阈值。一旦监测到超出设定的安全值,系统不仅会发出警报信号,还将自动中断装配流程,确保传感器和工件的安全。此外,达宽科技的软件采用直观的用户界面设计,将复杂的机器人控制和力控算法置于后台,让非专业人士也能轻松上手。这种友好的操作体验大幅降低了操作错误的风险,同时提升了工作效率。 新疆工业机器人力控监测达宽科技提供的机器人力控技术帮助企业降低了生产过程中的风险,确保了生产操作的安全性。

随着个性化定制生产需求的增长,传统的生产模式往往无法满足小批量、多品种生产的需求。机器人力控技术的引入,使得定制化生产成为可能。机器人能够根据客户的定制需求,自动调整施力和操作方式,完成各种复杂且独特的生产任务。无论是在制造个性化的产品外观,还是在执行小批量的生产任务时,机器人力控技术都能够确保生产过程中的高效与精细。达宽科技的机器人力控系统,凭借其高度灵活的调整能力,使企业能够更高效地应对定制化生产的挑战,提升了企业的市场响应速度和产品个性化服务能力。
机器人力控技术的比较大优势之一是提升生产效率。传统的工业机器人通过预设的路径和动作进行操作,但这种方法在面对复杂的环境或不规则的工作件时,容易出现效率低下和操作不精确的问题。而机器人力控技术通过实时感知外部环境的力量变化,能够根据实际情况灵活调整动作和施力,从而提高工作效率。达宽科技作为机器人力控领域的者,提供的力控解决方案,不仅能够加速生产过程,还能提高机器人的适应性。机器人力控能够精确地应对不同重量、尺寸、硬度的工件,确保机器人能够在多变的生产环境中持续稳定地工作,避免了传统生产方式中的瓶颈和低效。机器人力控技术提高了生产效率,达宽科技为企业提供高效、安全的自动化解决方案,提升了整体运营水平。

在现代制造业中,节能减排和环保生产已成为企业社会责任的重要组成部分。机器人力控技术能够帮助企业实现更加节能的生产方式。通过精细控制机器人在工作时施加的力量,机器人力控能够有效减少能源消耗和原材料浪费。机器人还能够减少因操作不当而产生的废弃物,从而降低了生产过程中的资源浪费,推动了环保型生产。达宽科技的机器人力控系统在这一领域的应用,有效帮助企业减少了对环境的负面影响,推动了绿色生产。机器人力控技术为企业提供了更高效、环保的生产方式,助力企业实现可持续发展的目标。达宽科技的机器人力控解决方案提升了生产过程中的操作灵活性,为企业创造更高的效益。新疆工业机器人力控监测
机器人力控技术助力企业提高工作效率,达宽科技提供的方案让每个生产环节更加流畅。新疆工业机器人力控监测
达宽机器人力控系统采用力位混合判断技术,并引入超限报警机制,将力和位移设置两级报警阈值。同时,设置线束装配成功时的力和位移判断依据。这解决了如何判断装配成功,如何判断失败,如何保护连接器的问题。接下来,我们需要关注如何优化装配过程,以应对微小偏差和不规则性,从而提高产品的合格率。面对装配过程中,线束这类可能出现的微小偏差和不规则性的工件,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术依托六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少干扰外力,从而让接口能够准确对接。同时,在装配过程中,该技术通过调整机器人的位置和姿态,减少干扰外力,防止因某一角度装配时干扰外力过大而装配失败。新疆工业机器人力控监测