商机详情 -
吉林工业机器人力控使用方法
随着市场需求的多样化,个性化定制已成为许多行业的重要趋势。机器人力控技术为实现高度定制化的生产提供了技术支持。通过精确的力控制和灵活的操作模式,机器人能够根据不同的生产要求执行精细化操作。这种定制化生产不仅体现在产品的外观、功能上,还体现在生产过程中的每个细节。达宽科技的机器人力控系统能够根据客户需求进行实时调整,确保每个定制产品的高质量和精确度。这使得企业能够在保持高效率的同时,更好地满足市场对个性化产品的需求,提升了市场竞争力。机器人力控优化了操作精度,达宽科技的解决方案为客户提供了高效且安全的生产流程,减少了不必要的风险。吉林工业机器人力控使用方法

随着环保意识的提升,许多企业开始关注绿色环保生产方式。机器人力控技术在这一领域也发挥了积极作用。通过精确控制机器人施加的力量,机器人力控不仅提高了生产精度,还减少了资源浪费。机器人在执行任务时能够根据实际需求调整施力,避免了过多的能源消耗和材料浪费,推动了更为环保的生产方式。此外,机器人力控技术还可以有效降低生产过程中的废品率,进一步减少了废弃物和资源的浪费。达宽科技的机器人力控技术,凭借其高效的控制能力,助力企业实现绿色生产,推动了智能制造与可持续发展的结合。江苏协作机器人力控系统机器人力控帮助生产线实现自动化,达宽科技的技术降低了生产风险,提高了整体产能。
达宽科技的机器人力控系统以其强大的兼容性而著称,能够实时准确地读取来自不同品牌的力传感器数据。系统还能与包括ABB、KUKA、FANUC等众多品牌及型号的机器人实现实时通讯。这种高度的兼容性确保了不同设备之间的无缝协同作业,进一步提升了生产流程的灵活性和效率。同时,系统内置了多组力控参数和负载辨识参数的保存功能,用户可以为每组参数设定个性化的终止条件。这种智能参数管理功能简化了配置过程,确保了在力控调节过程中对负载特性的一致性理解。
达宽科技的机器人力控平台不仅提升了机器人在复杂任务中的表现,还通过实时力位监测技术,确保装配过程中的每一个动作都达到毫厘之精。这种高精度的控制能力有效预防和减少了因力位误差导致的质量问题。达宽科技的解决方案通过强大的负载辨识能力和灵活的力控调节功能,为用户提供了一种高效、安全且易于操作的机器人控制方式。无论是在工业制造、精密装配还是柔性生产中,达宽科技的机器人力控技术都能帮助用户节省时间、提高效率,并确保产品的高质量输出。
在现代制造业中,高效的供应链管理对于企业的成功至关重要。机器人力控技术不仅能提升生产过程中的效率,还能对整个供应链管理产生积极影响。通过精细控制机器人施加的力,机器人力控技术使得生产过程中的每个环节都能更加精确、高效,确保物料、组件等在生产过程中能够按时到位,并且准确无误地进行处理。达宽科技的机器人力控系统,能够与企业的ERP系统、物流管理系统进行有效集成,优化库存管理、降低库存积压,同时减少因错误操作而引发的供应链瓶颈,极大地提升了整体供应链的效率和响应能力。借助达宽科技的机器人力控技术,用户可以轻松实现高精度控制,确保产品一致性,提升生产质量。

在现产中,产品质量的一致性是企业竞争力的之一。机器人力控技术能够通过精确调控施力来确保每个产品都符合严格的质量要求。与人工操作相比,机器人力控能够减少人为误差,确保机器人在执行重复性任务时始终保持稳定的操作力。这意味着,无论是对电子元件的组装,还是对汽车零部件的打磨,机器人力控都能够提供极高的精度,减少质量波动,确保每个产品的一致性和可靠性。达宽科技的机器人力控技术,凭借其精确的控制能力,广泛应用于多个行业,帮助企业确保每一件产品都符合高标准,提升了产品的市场竞争力。机器人力控技术提升了机器人在任务执行中的响应速度,达宽科技为企业提供了更高效的自动化解决方案。江西机器人力控报价
借助机器人力控,达宽科技提供的解决方案帮助企业更好地控制生产过程中的操作力,提升生产线效率。吉林工业机器人力控使用方法
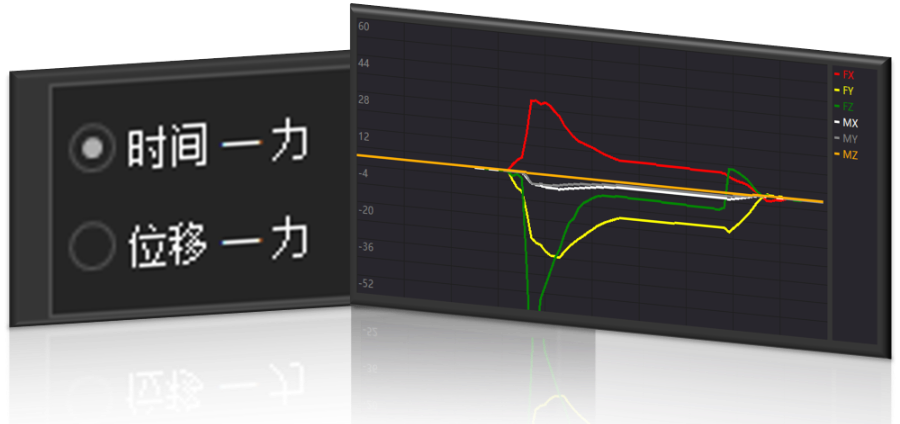
达宽机器人力控系统采用力位混合判断技术,并引入超限报警机制,将力和位移设置两级报警阈值。同时,设置线束装配成功时的力和位移判断依据。这解决了如何判断装配成功,如何判断失败,如何保护连接器的问题。接下来,我们需要关注如何优化装配过程,以应对微小偏差和不规则性,从而提高产品的合格率。面对装配过程中,线束这类可能出现的微小偏差和不规则性的工件,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术依托六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少干扰外力,从而让接口能够准确对接。同时,在装配过程中,该技术通过调整机器人的位置和姿态,减少干扰外力,防止因某一角度装配时干扰外力过大而装配失败。吉林工业机器人力控使用方法