商机详情 -
江西省时省力目标识别开发
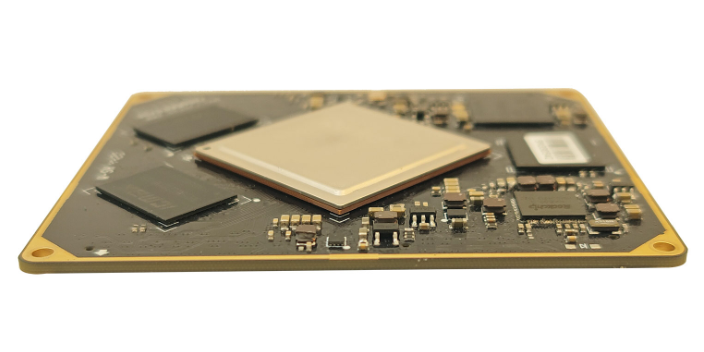
但这也遇到很多难点,通常情况下,视频回传的延迟大概在200ms左右,随着大量的弹打出,视频传输所需带宽就面临压力,如何在通信带宽有限的情况下,保证视频顺畅、清晰、无卡顿地传输,是分析改进这个工作需要解决的前期难点。针对于这个问题,慧视光电利用GS弱网高清音视频传输系统和RK3588打造的Viztra-HE030图像处理板结合,推出了低延迟低带宽图传解决方案。在一个窄带收发信道内,例如在信道有效带宽0.5Mb/s~2Mb/s内,多路视频和交互控制共用一对收发信道,信道支持数据透传,外部系统可以使用该信道,传输任意格式的数据;可实时调整视频码率,在低至500K带宽情况下依然可以回传清晰流畅的图像。可以使设备飞的更远、走的更远;可实现视频中继转发;能够基于H265实时视频编码;可实现基于视频流的“人在回路低延迟控制”。基于普通60帧相机,实现15ms的低延迟编解码,加上数据链传输延迟时间在30ms左右,目前业界前列。通用性强,使用更加灵活,适用更多应用场景;支持多路SDI视频在低至500K带宽情况下的同时传输(1080P60FPS),彻底解决“带宽苦恼”;整体时延约60ms(含相机、编解码、显示,不含传输),实现实时控制、实时打击。成都慧视开发的RK3588图像处理板可以用于陆地石油矿井开采监控视频目标识别。江西省时省力目标识别开发
目标识别
“启明935A”系列芯片已经成功点亮,并完成各项功能性测试,达到车规级量产标准。启明935A是行业首颗基于Chiplet(芯粒/小芯片)异构集成范式的自动驾驶芯片,但并非单一芯片,而是一个家族系列。启明935HUBChiplet可以和不同数量的大熊星座AIChiplet互相搭配,再结合灵活的封装方式,快速形成不同性能等级的SoC芯片。它还支持高带宽的PBLink多芯互连,双芯双向带宽128GB/s,四芯双向带宽64GB/s。启明935A每颗芯片都支持比较大20路的1080p60摄像头输入,可应用于各类端侧AI部署。得益于大熊星座NPU天然支持Transformer结构,初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。宁夏智能化目标识别经验丰富监控摄像头目标识别慧视可以做。
进入冬季,北方各地陆续出现冰冻天气,给不少地方的保供电工作增添了难度。目前,大多数地方都采用无人机巡检的模式,但是面临如此寒冻的天气,无人机也可能会“懈怠”。但是大面积覆冰的影响下,人工巡检又很难到达很多区域,所以还是不得不依靠无人机,只是需要性能更加强悍的无人机。无人机电力巡检依靠可见光或者红外两种方式进行自动巡视检测,这其中,用于进行图像处理的传感器性能尤其重要。面临如此寒冷的天气,图像处理板能否正常工作十分关键,因此选对图像处理板,关系整个寒冬的电力巡检。
城市湿地公园是“城市之肺”,是生态建设的重要一环,因此对于湿地公园的日常巡逻必不可少。但是大面积的湿地公园地形复杂交错,许多区域依靠传统的人工巡逻,无法到达。此外,人工巡逻的效率远远不够,无法做到及时响应和精确记录,久而久之,成本就不断累计增加。无人机的落地应用,能够有效减少人工成本的问题。无人机能够凭借小巧的身型,在湿地错综复杂的环境中自由穿梭,确保无死角。利用无人机打造智能巡检系统,通过高清摄像头抵近观察,能够实现湿地全域的高效巡检。其中,智能化的措施在于可以在摄像头的基础上加装图像处理板,通过图像处理板和算法的共同作用,能够让无人机摄像头变成“智慧眼”,这只“智慧眼”能够精细AI识别动物、树木、水中的杂物等等信息,通过大量的数据收集,为管理决策提供依据。无人机双光吊舱用目标识别图像处理板找成都慧视。

我国西部地区地形复杂、天气多变,许多电网架设在高山流水之间,给电网的巡检维护造成了不小的困难。于是,不同于传统人工巡检的智能化巡检维护开始逐步应用。这种方式采用无人机加智能化机器人,其中无人机承担巡检工作,而智能化机器人进行维护,两者互相配合。无人机搭载智能化吊舱,吊舱内置图像识别传感器,工程师可以通过远程识别、抵近观察等方式,找出问题所在。无人机机动性灵活性十足,能够便捷去到许多人工难以到达的区域,巡检无死角。无人机巡检一次能够抵得上三个人工同时作业,效率成倍提升。吊舱中植入慧视Viztra-HE032图像处理板就能实现目标识别。吉林低压线目标识别办公软件
反无人机目标识别用慧视Viztra-LE026图像处理板。江西省时省力目标识别开发
多目标跟踪是指在连续的图像中,通过目标检测算法识别出每一帧中的目标,并在时间上跟踪它们的位置和状态。但目标会不断发生尺度、形变、遮挡等变化,而且还会有目标出现和消失的情况,再加上视频采集端的相机所处环境可能受到外界影响导致抖动的情况(例如无人机高空检测),就会给多目标跟踪造成一定的困难。由于我们不能控制目标,所以只能从视频采集端维护跟踪的稳定性。因此,成都慧视针对于多目标检测跟踪抖动丢失的优化方法是:1.改进目标检测,使用更加鲁棒的目标检测算法。2.增强特征描述,利用深度学习提取更高级别的语义特征,这些特征对于小范围内的视角变化具有更好的不变性3.改进运动模型,在算法中加入对摄像头运动的估计,通过补偿摄像头运动来减小目标真实运动与预测之间的差距。4.数据关联策略,设计更灵活的数据关联算法,允许更大的距离阈值来匹配候选目标。江西省时省力目标识别开发