商机详情 -
中山五轴视觉点胶系统供货商
视觉点胶系统的教育培训可以按照以下步骤进行:资料准备:收集关于视觉点胶系统的相关资料,包括系统的原理、操作手册、安全注意事项等。确保培训人员对系统有多方面的了解。建立培训计划:根据培训的目标和培训对象的需求,制定详细的培训计划。涵盖培训内容、培训时长、培训形式等方面的安排。理论培训:首先进行系统的理论培训,介绍视觉点胶系统的原理、构成部分、功能特点等。讲解相关术语和概念,帮助培训对象建立起基本的理论知识。操作演示:通过实际操作演示的方式,向培训对象展示视觉点胶系统的操作流程。可以使用示范设备或者仿真软件进行演示,让培训对象熟悉系统的界面、功能按钮、参数设置等。实操训练:提供实际的视觉点胶系统设备,让培训对象进行实际操作训练。设计一系列的实操练习,逐步引导培训对象掌握系统的操作技巧和应用技巧。自动调节参数功能使得视觉点胶系统能够适应不同生产需求。中山五轴视觉点胶系统供货商
视觉点胶系统如何识别产品位置自动加工:我们的视觉点胶系统如何自动识别产品位置,且不用绘制轨迹就能自动加工。"在机器加工台面上方我们安装了高清工业相机,通过工业相机镜头去捕捉产品的位置,尽管我们的产品随便摆放,但是通过我们先进的图像处理算法,仍然可以实现精确到0.01mm的点胶定位。还有更厉害的是都不用去做点胶路径文件,就能直接根据产品的形状和尺寸自动调整点胶路径来自动点胶,其实这就是我们点胶系统中的自动巡边功能。 上海喷胶机视觉点胶系统成熟好用高精度胶水涂覆使得视觉点胶系统成为医疗设备制造中不可或缺的设备。

视觉点胶系统—飞行点胶功能:"旗众智能点胶系统的飞行点胶功能,即在打点运动的过程中,实现动态精细工艺拍照,减少反复起停稳定耗时,实现不停顿生产,大幅提高生产效率。"准确计算点胶位置,实现运动中点胶的“指哪点哪”效果,包括起点/终点准确定位以及每一个点的精确定位,可实现一秒加工十多个产品。当机器人运动到拍照点区域,其内部算法会利用高速IO信号触发相机进行动态无停顿拍照同时对实际拍照位置进行高速锁存,再利用相机回传的位置数据和机器人高速所存位置。
视觉点胶系统是工业机器人应用中非常重要的一环,为了优化这一过程,可以考虑以下几个方面:选用合适的硬件设备:视觉点胶系统需要高清晰度的摄像头、快速的图像处理器、高精度的运动控制器等硬件设备。因此,选用合适的硬件设备是优化视觉点胶系统的首要条件。控制系统优化:视觉点胶系统需要高速、高精度的运动控制器对机器人进行控制。通过对控制系统进行优化,可以提升机器人的运动精度和速度,从而提高视觉点胶系统的效率和稳定性。图像处理算法优化:图像处理算法是视觉点胶系统的关键。优化图像处理算法可以提高视觉系统的鲁棒性和准确性,降低误判率,提高点胶效率。涂胶参数优化:根据不同的涂胶需求,合理设置涂胶参数,如涂胶速度、涂胶量、涂胶时间等,可以有效降低涂胶的误差率,提高涂胶质量。视觉点胶系统的高效胶水应用使得企业在市场竞争中保持先进地位。

视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。通过视觉点胶系统,企业可以实现批量作业,大幅提高生产效率。上海喷胶机视觉点胶系统成熟好用
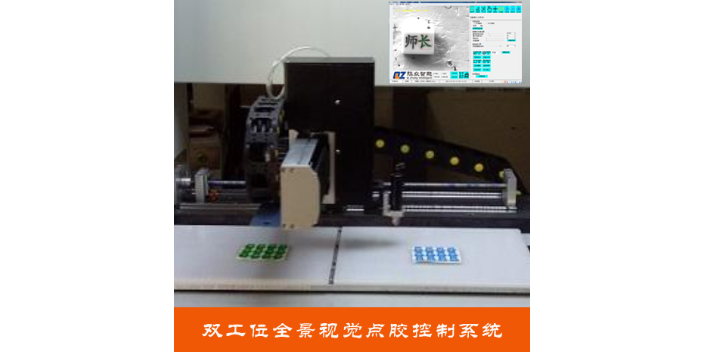
全景+局部双重视觉定位系统结合了高效性和高精度,适用于多种工业应用场景。中山五轴视觉点胶系统供货商
视觉点胶系统在确保点胶的牢固性和耐久性方面,通常采取以下几种措施:胶水选择:选择合适的胶水材料非常重要。不同的应用场景需要需要使用具有不同特性的胶水,如强粘性、高温耐受性、化学抗腐蚀性等。视觉点胶系统通常会根据具体的需求选择适合的胶水,以确保牢固性和耐久性。胶水的加热和控制:一些特殊的胶水需要需要在点胶之前进行加热处理,以改善其流动性和粘附性。视觉点胶系统可以配备加热设备,对胶水进行预热,并根据胶水的特性进行温度控制,以确保胶水在点胶过程中具有良好的流动性和粘附性。精确的点胶位置和压力控制:视觉点胶系统通过图像处理和分析技术,能够实时检测工件表面的形状、大小和位置等特征,并确定点胶的位置和路径。系统还可以控制点胶时的压力,以确保胶水均匀地涂敷在工件表面,并保证牢固性和耐久性。中山五轴视觉点胶系统供货商