商机详情 -
佛山落地式视觉点胶系统源头厂家
视觉点胶系统是工业机器人应用中非常重要的一环,为了优化这一过程,可以考虑以下几个方面:选用合适的硬件设备:视觉点胶系统需要高清晰度的摄像头、快速的图像处理器、高精度的运动控制器等硬件设备。因此,选用合适的硬件设备是优化视觉点胶系统的首要条件。控制系统优化:视觉点胶系统需要高速、高精度的运动控制器对机器人进行控制。通过对控制系统进行优化,可以提升机器人的运动精度和速度,从而提高视觉点胶系统的效率和稳定性。图像处理算法优化:图像处理算法是视觉点胶系统的关键。优化图像处理算法可以提高视觉系统的鲁棒性和准确性,降低误判率,提高点胶效率。涂胶参数优化:根据不同的涂胶需求,合理设置涂胶参数,如涂胶速度、涂胶量、涂胶时间等,可以有效降低涂胶的误差率,提高涂胶质量。视觉点胶系统的数据分析功能可以帮助企业监控生产过程并进行优化。佛山落地式视觉点胶系统源头厂家
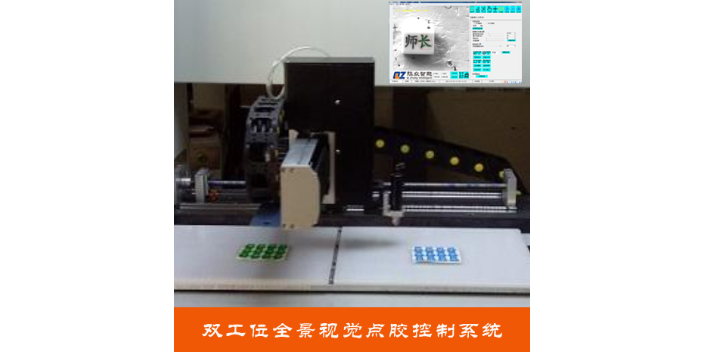
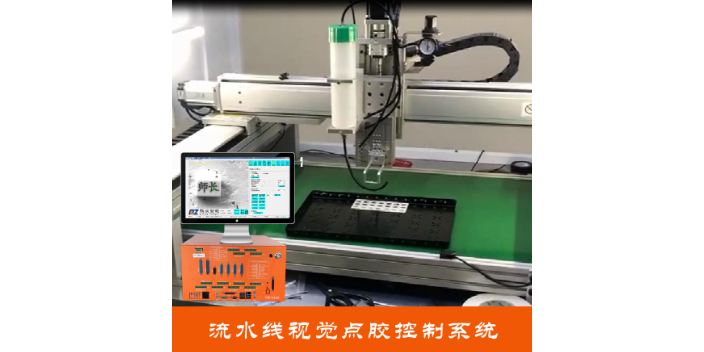
为满足整个灌胶工作执行效果更精确更快速的需求,旗众智能针对灌胶设备自主开发出一款灌胶视觉控制系统,能够完美实现各种点、线、弧、圆等不规则图形的灌胶。该系统有着操作简单、速度快、控制精确、效率高等特点,能有效提高企业生产效率,降低生产成本。产品应用:汽车机械零件涂布,手机按键点校,手机电池封装,笔记本电池封装,线圈点胶,PCB板绑定,IC,喇叭外圈封胶,LCD封胶,IC封装,IC粘接,机壳粘接等。功能简介:1、胶量控制精确:自主研发灌胶控制系统,结合多年工艺经验,有效避免出胶不匀,滴胶,拉丝,毛边等现象;2、无需治具,自动视觉定位灌胶位置,尤其适用于要求精度高的产品,如电(线)路板行业、电子元器件行业、电光源行业、小家电行业、点火器行业、车载用品行业、吸尘器行业、过滤器行业等许多领域;3、支持大工作加工台面,CAD等文件导存,可直接调用文件,省时省力;4、PC一体化控制器,接线简单,软件易于操作,支持灌胶单机、灌胶流水生产线。五轴视觉点胶系统网站视觉点胶系统的应用范围普遍,适用于各种工业制造领域。
视觉点胶系统—坏点功能:在点胶过程中,你有没有遇到过不良品被加工或存在重复点胶的问题?别担心,有了我们的视觉点胶系统软件,这些问题将成为过去!我们的软件具备强大的坏板检测功能。通过高精度的图像识别和智能算法,它能够准确识别已经点过胶的产品,避免对同一产品进行重复点胶。而且当检测到表面存在缺陷的工件时,会自动跳过加工,有效减少废品率。在使用我们的软件时,您只需打开坏板检测功能,将产品放在加工台面上,软件将自动进行图像识别,并标记已经点过胶的区域。这样,即使产品再次经过点胶区域,软件也会及时发出警示,确保不会重复点胶。使用我们的软件,可以让设备轻松区分已经点过胶的产品,避免重复点胶和不良品的产生。无论是批量生产还是小批量定制,我们的软件都能为您提供高效、准确的点胶解决方案。
视觉点胶系统在应对小尺寸工件时通常表现出以下特点:高精度定位:视觉系统可以通过图像处理技术对工件进行高精度的定位和定位校正。对于小尺寸工件,视觉点胶系统能够准确地识别工件的位置和方向,以便进行精确的点胶操作。精细调节能力:视觉点胶系统通常具备多轴控制功能,可以对胶水的点胶路径、速度和压力等进行调节。这种精细调节能力使得系统能够在小尺寸工件上实现准确的胶水施加,避免浪费和胶水溢出。快速反应速度:视觉点胶系统能够实时获取并处理图像信息,具备快速反应的能力。在应对小尺寸工件时,系统可以迅速检测和跟踪工件的位置变化,及时调整点胶位置和参数,以保证点胶的准确性和一致性。多样化的工件适应性:视觉点胶系统通常具备灵活的工件适应性,能够适应各种形状、大小和材料的小尺寸工件。通过调整视觉系统的参数和设置,可以处理不同类型的工件,并对每个工件进行定制化的点胶操作。视觉点胶系统的高精度胶水涂覆技术使得生产过程更加稳定可靠。
视觉点胶系统在复杂场景中保持稳定性的关键在于以下几个方面:图像处理算法优化:视觉点胶系统使用高效的图像处理软件进行图像分析和识别。对于复杂场景,系统可以采用特定的算法来处理图像,并去除干扰因素,以获得准确的图像信息。这些算法可以包括边缘检测、滤波、噪声抑制等技术,以提高系统对复杂环境的适应能力。视觉传感器选择:选择适合复杂环境的高质量视觉传感器对于系统的稳定性至关重要。这些传感器需要具备高分辨率、高灵敏度和快速响应的特点,以准确地捕捉和处理复杂场景中的图像信息。自适应校正:视觉点胶系统可以根据复杂场景的变化自适应地进行校正。系统可以实时监测工作环境中的变化,并根据这些变化对点胶的位置和路径进行调整。例如,系统可以检测工件的位置、形状和尺寸,并根据这些信息进行实时的校正,以确保胶水的点胶位置准确无误。视觉点胶系统的自动化设计使得企业能够应对很大强度的生产需求。中山流水线跟随视觉点胶系统成熟好用
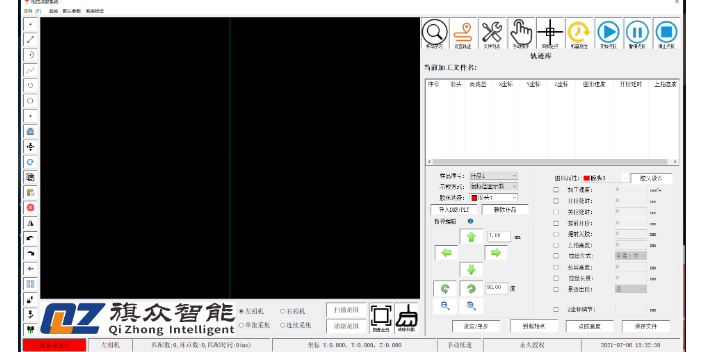
操作人员可以轻松设置参数,系统即可根据要求自动完成准确的点胶工作。佛山落地式视觉点胶系统源头厂家
视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。佛山落地式视觉点胶系统源头厂家