商机详情 -
金山区减速机
在机器人领域,精密行星减速机在关节部位有着至关重要的应用。机器人的关节需要精确控制角度、速度和扭矩,以实现灵活多样的动作。精密行星减速机能够满足这些要求。它安装在电机和机器人关节之间,对电机的高速输出进行减速。例如,在工业机械臂的关节中,电机的高转速经过行星减速机的减速后,转化为合适的关节转动速度,同时能够精确地控制关节的扭矩输出。这使得机械臂在抓取、放置等操作中能够准确地定位和施加合适的力量。对于多关节协作的机器人,每个关节上的行星减速机都能保证动作的准确性和稳定性,从而使机器人可以完成复杂的任务,如汽车组装线上的精确焊接、零部件安装等,**提高了机器人的工作性能和生产效率。应经常检查油位,若油量不足应即时补足。金山区减速机
行星减速的原理实际上与齿轮减速的原理相同。行星轮系统的主要特征是它至少有一个行星轮。行星轮不仅绕着自己的轴旋转,而且绕着另一个固定轴旋转。与行星一样,它在特征轨道上围绕太阳运行,因此被称为行星减速器。行星减速器说到底是一种减速设备。在保证精密传动的前提下,降低转速,增加扭矩,降低负载/电机的旋转惯性比。行星减速器采用渐开线行星齿轮传动。应用于自动化、农业、舞台照明、能源(太阳能)、汽车起重、交通监控、消防监控、云台、道路大门等领域。现在用的比较多的领域可能就是伺服电机了,伺服电机搭配行星减速机能够极大的减少成本,因为大多数情况下一个减速机要比伺服电机便宜多了,所以很多时候厂家为了经济考虑,会使用伺服电机搭配减速器的作法。但是它们搭配一定要注意确定好伺服电机的功率、法兰大小、减速比等关键参数,只有这样才能达到想要的效果。嘉定区现代化减速机产品介绍齿轮减速电机一般是通过把电动机、内燃机或其他高速运转的动力通过齿轮减速电机的输入轴上的齿数少的齿轮。

相较于齿轮减速机,精密行星减速机也有其独特之处。普通齿轮减速机在结构上相对简单,但在承载能力和精度方面可能不如行星减速机。行星减速机的多个行星轮分担负载的设计使其承载能力更强,能适应更大的扭矩需求。在精度方面,精密行星减速机通过优化的齿轮设计和制造工艺,可以实现更高的精度。例如,在一些对角度和位置控制要求严格的自动化设备中,行星减速机能够更好地满足要求。而且,行星减速机的输入输出轴可以在同一轴线上,这种同轴设计使得传动系统更加紧凑和稳定,在一些需要精确传动和空间紧凑的应用场景中,如航空航天设备中的姿态调整机构,具有明显的优势。
精密行星减速机的工作原理基于齿轮传动。当动力从输入轴传递到太阳轮时,太阳轮开始转动。太阳轮的旋转带动与其啮合的行星轮转动,行星轮在自转的同时围绕太阳轮公转。由于行星轮与内齿圈也相互啮合,内齿圈固定不动,行星轮的公转运动通过行星架输出。通过合理设计太阳轮、行星轮和内齿圈的齿数比,可以实现不同的减速比。例如,若太阳轮有 10 个齿,行星轮有 20 个齿,内齿圈有 50 个齿,根据行星减速机的传动比计算公式,可以得出相应的减速比。这种齿轮传动方式使得动力在传递过程中能够精确地减速,并且能够保证较高的传动效率,减少能量损失,为需要精确速度和扭矩控制的设备提供了可靠的动力传输解决方案。能耗低,性能优越,减速机效率高达95%以上;
行星减速机的精度单位为孤分:1度分为60弧分。例如,当回程间隙标记为1min时,表示减速机每转一圈,输出端的角度偏差为1/60。在实际应用中,这个角度偏差与轴的直径有关,b = 。也就是说,当输出端半径为500mm时,齿轮箱的接触度为10,即a"=3/60,减速机一转的偏差为B = 0.44mm,行星齿轮箱的传动精度也叫回程间隙。减速机的回程间隙是当输出端固定,输入端顺时针和逆时针旋转,使输出端产生2%的额定扭矩时,减速机的输入端有微小的角位移,这就是回程间隙!
减速机可以根据需要选择不同的传动比例,以满足不同的工作要求。静安区高精密减速机
要用溶剂彻底轴伸、法兰、键表面的防腐剂、污物等,时要注意不要让溶剂浸入到油封处。金山区减速机
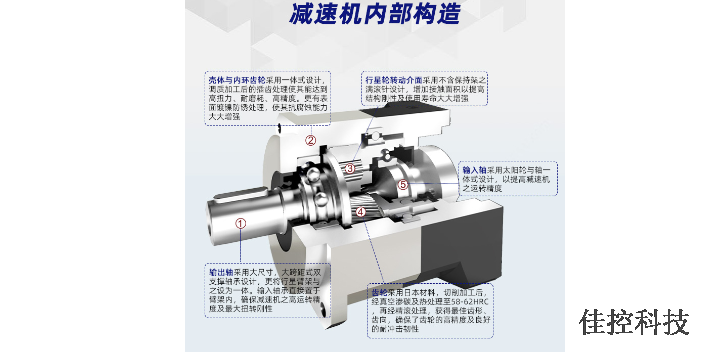
精密行星减速机主要由太阳轮、行星轮、内齿圈和行星架等部件构成。太阳轮位于中心位置,它与输入轴相连,动力由此输入。行星轮围绕太阳轮公转的同时进行自转,通常有多个行星轮均匀分布,这种设计使得受力更加均匀。内齿圈是固定的环形齿轮,与行星轮相互啮合。行星架则用于支撑行星轮,并输出减速后的动力。这种独特的结构赋予了行星减速机许多优点,比如在相同的空间内可以实现更大的传动比。与其他类型的减速机相比,它的结构紧凑,能够高效地传递扭矩,并且由于多个行星轮分担负载,具有较高的承载能力,广泛应用于对精度和可靠性要求较高的自动化设备、机器人等领域。金山区减速机