商机详情 -
甘肃智能四向车
WMS 四向车与仓储管理系统(WMS)的数据交互基于 “工业以太网 + 标准化协议” 实现,设备通过 Profinet 或 Modbus 协议接入 WMS 系统,建立双向数据通道,实现货位信息、订单需求、作业状态的实时同步。在货位信息同步方面,WMS 将货位的 “占用 / 空闲” 状态、货物存储信息(如 SKU、数量、有效期)实时下发至四向车,设备可快速定位目标货位;在订单需求同步方面,WMS 将出库订单、入库订单的任务信息(如货物名称、数量、目标货位)下发至四向车,设备按订单优先级执行作业;在作业状态同步方面,四向车将实时运行状态(如位置、电量、作业进度)上传至 WMS,系统可实时监控设备运行情况。某电商企业的 WMS 系统与 20 台四向车联动,数据交互延迟≤1 秒,货位信息更新准确率达 100%;当客户下单后,WMS 在 10 秒内将订单任务下发至四向车,设备立即执行出库作业,订单出库时间从传统的 30 分钟缩短至 15 分钟。此外,数据交互还支持 “断点续传”—— 若网络临时中断,四向车可存储未完成的作业数据,网络恢复后自动上传至 WMS,避免数据丢失;某仓储企业的测试显示,网络中断 1 小时后恢复,设备作业数据无任何丢失,作业可正常续行,确保仓储流程不中断。
车体采用 45# 钢激光切割成型,模块化设计兼顾载重(1.5-2 吨 +)与轻量化,安全系数≥1.6。甘肃智能四向车
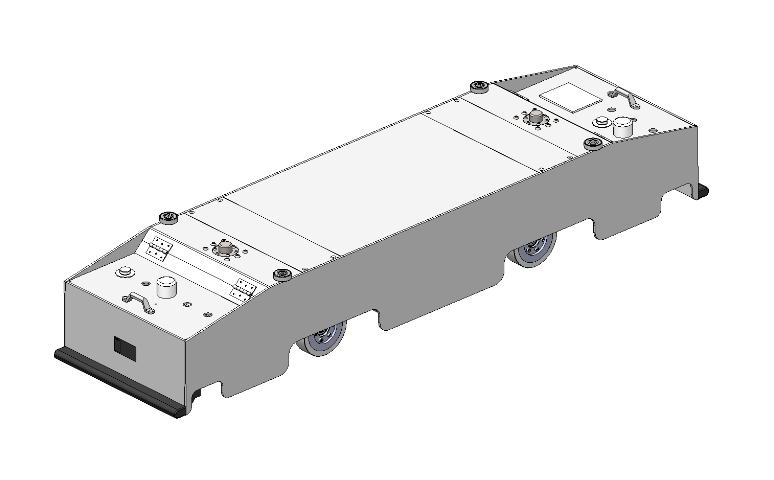
四向车的技术先进性集中体现在三大主要特征的协同运作,构建了无人化搬运的基础。双轮系驱动是其实现多向运动的机械基础,两套单独轮系分别对应 X、Y 方向,通过 PLC 控制轮系切换,使设备可在任意节点实现 90° 换向,无需掉头空间,这一设计打破了传统搬运设备的行驶方向限制,尤其适配狭窄巷道的密集存储布局。自动换向技术则依赖于反射光电与校正片的精细配合,当设备行驶至换向点时,两个间距 10cm 的光电传感器会扫描 10.3cm 长的校正片,通过检测信号同步性调整车身位置,确保换向时轮系与轨道精细对接,避免偏移。换层作业作为三维仓储的关键环节,通过与提升机的联动实现,带车模式下四向车自动驶入提升机货台,随货物一同升降至目标楼层,全程无需人工干预,作业效率较不带车模式提升 30% 以上。这些机械特征与智能化调度系统深度融合,通过 WCS 系统接收订单指令后,自动分配作业任务、规划比较好路径,实现多车协同、动态避障,从货物入库、存储、盘点到出库的全流程无人化操作,不仅降低了人工成本,更将作业差错率控制在 0.1% 以下,为仓储物流的高效运转提供了主要支撑。广州汽车四向车小车适配平库、楼库、高库、异形库等多类型仓储,在老仓改造中尽可能合理利用梁柱间空间。
制造业的生产物流涵盖 “原材料入库 - 线边补货 - 成品出库” 三大环节,各环节需求差异大,传统设备需分环节配置(如原材料库用堆垛机、线边库用 AGV),导致系统割裂、数据不通,而四向车通过多机型、多系统协同,实现全流程无缝适配。在原材料库,托盘式四向车可承载重型原材料,配合密集货架提升存储密度,同时与供应商送货车辆的输送线对接,实现原材料自动入库;在线边库,料箱式四向车可根据 MES 系统的生产进度,实时向生产线输送零部件(如汽车生产线的螺丝、电子厂的芯片),实现 “按需补货”,避免生产线缺料停工;在成品库,箱式或托盘式四向车可根据 ERP 系统的订单需求,自动完成成品出库,配合物流车辆实现 “出库即发运”。这种全流程适配的主要在于数据贯通:四向车系统通过 API 接口与 MES、ERP 系统对接,原材料入库数据自动同步至 MES,线边补货数据反馈至生产进度表,成品出库数据更新至 ERP 库存,实现 “原材料 - 生产 - 成品” 的全流程数据穿透。某电子制造企业引入四向车系统后,覆盖其原材料库、线边库、成品库,生产物流的人工成本降低 60%,生产中断时间从每月 10 小时缩短至 2 小时,成品出库效率提升 50%,实现生产与仓储的高效协同。
四向车的双重定位算法,是解决 “累计误差” 问题、确保高精度作业的关键。脉冲定位算法基于编码器实现:编码器安装在驱动轮上,车轮每转动一圈,编码器会产生固定数量的脉冲信号(如每圈 1000 个脉冲),软件通过计数脉冲数量计算设备位移(如车轮周长 0.5m,1000 个脉冲对应位移 0.5m)。但脉冲定位存在累计误差问题 —— 长期运行中,车轮磨损、轨道打滑等因素会导致实际位移与脉冲计算位移偏差逐渐增大(如运行 1000m 后,误差可能达到 5-10mm),影响换向与存取精度。RFID 定位算法则作为修正机制,轨道每隔 1m 设置一个ID 的定位码,四向车行驶过程中,RFID 传感器每扫描到一个定位码,就会将该定位码的实际坐标与脉冲计算的位移坐标进行对比,若存在偏差(如脉冲计算位移为 100m,定位码实际坐标为 100.003m),软件会自动修正脉冲计数参数,消除累计误差。这种 “脉冲实时计算 + RFID 定期修正” 的双重定位模式,使四向车的定位精度稳定在 ±1mm 以内,较单一脉冲定位算法,精度提升 80%。在换向场景中,该算法尤为重要 —— 例如 Y 向换向时,若存在 5mm 定位误差,可能导致车轮无法精细对接 Y 向轨道,引发设备卡顿,而双重定位算法可通过定位码修正,确保换向时车轮与轨道完全对齐。调度系统具备多车协同、动态避障功能,可根据订单优先级优化作业路径。

四向车的设备状态监控模块,是实现 “预测性维护”、降低停机风险的主要。该模块通过传感器实时采集设备运行数据,涵盖三类关键信息:运行参数(行驶速度、顶升时间、换向次数),用于判断设备是否处于正常作业状态(如速度突然下降可能是驱动电机故障前兆);能源参数(电池电量、充电次数、能耗),用于管理设备续航(如电量低于 20% 时,自动提醒充电,避免中途断电);故障数据(电机过载、传感器异常、通讯中断),用于快速定位问题(如传感器异常时,会记录异常发生时间、传感器 ID,便于运维人员针对性检查)。这些数据通过通讯模块实时上传至管理系统,系统会以可视化仪表盘形式展示(如速度曲线、电量柱状图、故障预警列表),管理人员可直观掌握所有设备的运行状态。远程诊断功能则基于故障数据实现:当设备出现故障时,系统会自动分析故障代码,并匹配故障知识库中的解决方案,运维人员可通过远程终端查看解决方案,甚至通过云通讯下发参数调整指令(如重置电机保护阈值),无需现场排查。这种监控与诊断模式,使设备故障排查时间从平均 4 小时缩短至 1 小时,年停机时间减少 60%,在冷链、医药等连续作业要求高的场景中,有效降低因设备故障导致的仓储中断损失。相较于 AGV 和堆垛机,四向车兼具速度快、定位准、灵活性高的优势,适配密集存储需求。立库四向车管理系统
四向车穿梭车适配 1.2-2.5m 深的货位设计,可存储多 SKU 货物,尤其适合电商、快消等多品类仓储场景。甘肃智能四向车
在智能仓储设备选型中,四向车凭借对 AGV 与堆垛机的性能互补优势,成为密集存储场景的推荐方案。与 AGV(自动导引车)相比,四向车采用固定轨道行驶模式,避免了无轨导航的路径偏差问题,空载运行速度可达 1.4-1.6m/s,满载速度 1.0-1.2m/s,远超普通 AGV 的 0.8-1.0m/s;定位精度通过编码器、RFID 与定位码的多重校准,可达到毫米级,而 AGV 受环境干扰较大,定位误差通常在厘米级。同时,四向车的控制逻辑更简洁,通过轮系切换即可实现换向,无需复杂的路径规划算法。与堆垛机相比,传统堆垛机只有能在单一巷道内作业,换巷道需依赖地面输送设备,而四向车可在同一楼层的多个巷道间自由穿梭,配合提升机实现跨楼层作业,灵活性有效提升。这种优势使其在高密度存储场景中表现突出,尤其适用于 SKU 繁多、出入库频率高的电商、快消等行业。通过增减小车数量即可动态调整系统处理能力,避免了堆垛机 “一巷道一机” 的资源浪费,在不规则仓库或老仓改造项目中,更能通过避障功能适配复杂空间布局,比较大化挖掘仓储潜力。甘肃智能四向车
苏州森合知库机器人科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**苏州森合知库机器人科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!