商机详情 -
长春直流无刷电机公司
一体化直流无刷电机作为机电融合技术的集大成者,其重要价值在于通过高度集成的系统设计实现性能与可靠性的双重突破。该类电机将驱动控制器、传感器与电机本体深度整合,形成具备智能调速、精确定位和动态响应能力的闭环系统。相较于传统分体式结构,一体化设计消除了信号传输延迟与电磁干扰问题,通过内置霍尔传感器或无感算法实时监测转子位置,结合驱动器中的微处理器实现毫秒级换相控制。例如,在工业机器人关节驱动场景中,一体化电机可直接接收运动控制指令,在0.1秒内完成从静止到额定转速的加速,同时将位置误差控制在±0.01度以内。这种特性使其成为数控机床进给系统、半导体晶圆传送机械臂等高精度场景选择的动力源,综合节电率较异步电机方案提升35%以上。半导体晶圆传送机械臂通过无刷直流电机,实现微米级定位精度。长春直流无刷电机公司

直流无刷电机凭借其高效能、低噪音及长寿命的重要优势,已成为现代工业与消费领域的关键动力源。在新能源汽车领域,其作为驱动电机的重要部件,通过电子换向技术实现高精度扭矩控制,配合碳化硅功率器件的应用,可支持超高速运转场景,例如氢燃料电池空压机的动力系统。在工业自动化领域,无刷电机普遍用于机器人关节驱动与数控设备进给系统,其无接触式电子换向结构消除了传统碳刷磨损问题,使机械臂重复定位精度达到±0.01mm级,同时寿命较异步电机提升3-5倍。医疗设备领域的应用更显技术深度,ECMO离心血泵采用微型无刷电机后,转速稳定性误差控制在±0.5%以内,配合磁悬浮轴承技术实现零摩擦运转,为心肺功能衰竭患者提供持续生命支持。在航空航天领域,卫星姿态控制飞轮通过定制化无刷电机实现微牛级推力控制,其真空环境适应性设计使电机在-180℃至+200℃极端温度下仍能稳定工作,确保卫星轨道调整精度达0.001°/秒。合肥一体化直流无刷电机电动窗帘电机是无刷直流电机,使用寿命长,维护需求较少。
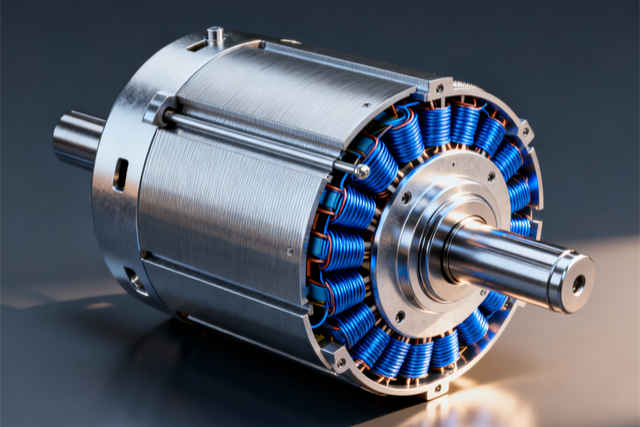
转子部分则通过永磁体与导磁材料的组合实现磁场恒定输出。现代无刷电机普遍采用钕铁硼等稀土永磁材料,其剩磁强度可达1.2T以上,矫顽力超过900kA/m,确保在高速旋转中保持磁场稳定性。永磁体通常以表面贴装(SPM)或内嵌式(IPM)结构固定于转子铁芯,表面贴装式将磁瓦直接粘贴于铁芯外表面,适用于低转速、高扭矩场景;内嵌式则将磁体嵌入铁芯内部,通过导磁桥连接,可降低齿槽转矩波动,提升高速运行平稳性。转子铁芯多选用高导磁率的硅钢片,其作用是集中永磁体磁场并减少漏磁,同时与定子磁场形成高效耦合。当定子旋转磁场与转子永磁磁场相互作用时,根据电磁感应定律,转子会受到切向力矩作用而持续旋转,其转速与电源频率和极对数严格相关,满足同步电机特性。
内转子直流无刷电机的性能优势源于其独特的电磁设计与控制策略的协同优化。从电磁设计层面看,转子永磁体的梯形磁极分布与定子绕组的集中整距绕制方式,使得电机在运行过程中能够产生接近方波的反电动势波形,这种波形特性与方波驱动控制器的六步换相逻辑高度匹配,从而在低速段(0-3000rpm)实现高达95%的效率。当转速超过基速后,通过弱磁控制技术调整磁场方向,可使电机工作范围扩展至额定转速的2-3倍,满足高速加工中心(如主轴转速达60000rpm的精密铣床)或高速离心机(转子线速度超过200m/s)的极端工况需求。在控制策略方面,双闭环PID调节系统(速度环与电流环)的引入,使得电机在负载突变时能够快速恢复稳定转速,例如在工业机器人关节驱动中,当机械臂抓取重物时,电机可在20ms内将转速波动控制在±1rpm以内;而自适应模糊PID控制算法的应用,则进一步提升了电机在非线性负载(如纺织机械中的变频卷绕系统)下的控制精度,使转速波动率降低至0.1%以下。这些技术突破使得内转子直流无刷电机在智能制造、新能源、航空航天等领域成为不可替代的重要动力源。智能加湿器通过无刷直流电机控制雾量,提升室内湿度的舒适性。

从技术演进视角看,一体化直流无刷电机的发展深刻体现了多学科交叉创新的成果。其驱动控制器采用SiC功率器件与DSP数字信号处理技术,使开关频率突破200kHz,电机本体则通过分布式绕组设计与钕铁硼永磁材料优化,在相同体积下实现3倍于传统电机的转矩密度。在新能源汽车领域,这种技术融合催生了电子水泵、电动压缩机等关键部件的革新,通过将电机、控制器与叶轮集成于单一壳体,系统体积缩小40%,能效提升至92%。更值得关注的是,随着AI算法的嵌入,一体化电机开始具备自适应调节能力,例如在智能家电中可根据负载特性动态优化运行曲线,在保持输出性能的同时将噪音控制在30dB以下。这种从单一动力输出向智能动力管理平台的转变,正推动着工业自动化、医疗设备、航空航天等领域向更高效率、更低能耗的方向演进。微波炉散热用无刷直流电机,降温迅速,保障微波炉使用安全。长春直流无刷电机公司
数控机床进给系统使用无刷直流电机,确保加工过程的精确位移控制。长春直流无刷电机公司
位置传感器作为电子换向的关键部件,通过实时监测转子角度实现精确控制。霍尔传感器是常见的低成本方案,其工作原理基于霍尔效应:当转子永磁体旋转至传感器附近时,磁场变化使半导体材料产生电压脉冲,每60°电角度输出一个方波信号,控制器据此判断转子位置区间。对于高精度需求场景,光电编码器或磁电编码器可提供更细致的反馈,例如1024线编码器每转输出1024个脉冲,通过A/B相正交信号可计算转速与转向,甚至通过Z相索引信号实现位置定位。无位置传感器技术则通过检测定子绕组反电动势(Back-EMF)估算转子位置,当电机旋转时,绕组切割磁感线产生的感应电压波形与转子角度直接相关,通过分析三相反电动势的过零点或相位关系,可推断换向时刻,该技术明显降低了电机成本与体积,但低速时检测精度受限。无论采用何种传感器方案,其重要目标均为确保控制器在正确时机切换绕组通电顺序,使定子磁场始终以好的角度牵引转子旋转,实现高效、平稳的能量转换。长春直流无刷电机公司