商机详情 -
成都300w直流无刷电机
从控制方式维度划分,直流无刷电机可分为有感电机和无传感器电机两类。有感电机通过霍尔传感器、光电编码器等元件实时监测转子位置,形成闭环控制系统,在低速运行或需要精确定位的场景中表现突出。例如工业机器人的关节驱动、医疗设备的精密输送装置等,均依赖有感电机的位置反馈实现毫米级运动控制。而无传感器电机则通过检测定子绕组的反电动势波形来推算转子位置,省去了物理传感器,明显降低了系统复杂度和成本。这类电机在高速运转时优势明显,常见于风扇、水泵等持续负载应用,其控制算法通过软件优化可实现软启动、过载保护等功能。随着磁编码器技术和算法模型的进步,无传感器电机的启动性能和低速抖动问题已得到大幅改善,逐步向高精度领域渗透,形成与有感电机互补的市场格局。虚拟现实力反馈手套采用无刷直流电机,模拟真实触觉交互体验。成都300w直流无刷电机
在应用层面,低速直流无刷电机的设计灵活性使其能够适应多样化的需求。通过调整定子绕组结构、磁钢材料或驱动算法,电机可以在宽转速范围内实现平稳的扭矩输出,甚至在极低转速下仍能保持高精度控制。例如,在无人机云台、3D打印机或精密光学设备中,这类电机能够提供无抖动、低振动的运行效果,确保设备的稳定性和成像质量。同时,其无刷结构减少了电磁干扰,适用于对信号纯净度要求较高的场合。在控制方式上,低速直流无刷电机支持PWM调速、闭环反馈控制等多种模式,配合先进的传感器技术,可实现实时速度监测和动态调整。随着物联网和智能控制技术的发展,这类电机正逐步向智能化、网络化方向演进,通过集成通信模块实现远程监控和故障诊断,为工业4.0和智能家居等领域的应用开辟了新的可能性。900w直流无刷电机供货商农业灌溉喷头靠无刷直流电机旋转,灌溉范围均匀,节约水资源。

位置传感器作为电子换向的关键,通过实时监测转子磁极位置,为控制器提供换向依据。常见的霍尔传感器以每60°电角度输出一个脉冲信号,将转子位置划分为六个区间,控制器据此切换定子绕组的通电顺序。例如,当转子N极靠近A相绕组时,控制器启动B相与C相反向通电,形成与转子磁场呈90°夹角的旋转磁场,从而产生较大转矩。对于高精度应用场景,光电编码器或磁电编码器可提供更精细的位置反馈,其1024线分辨率能精确计算转子角度与转速,甚至支持闭环矢量控制。而无位置传感器技术则通过检测定子绕组的反电动势波形,间接推算转子位置,这种方案在成本敏感的小功率电机中普遍应用。无论是哪种传感器方案,其重要目标都是确保定子磁场与转子磁场的相位差始终维持在很好的范围,从而较大化电机效率与动态响应能力。
在消费电子与智能家居领域,外转子直流无刷电机的应用正推动产品向高效、静音方向升级。以空气净化器为例,其重要风扇单元采用外转子电机后,不仅实现了风量与噪音的平衡,还通过电子换向技术消除了传统有刷电机因电刷摩擦产生的电磁干扰,延长了设备使用寿命。在智能家电中,外转子电机的无级调速功能与传感器反馈系统结合,可实时调整运行状态以适应不同工况。例如,扫地机器人的驱动轮采用外转子电机后,既能以低速模式实现精确避障,又能在爬坡时瞬间提升扭矩,确保清洁效率。更值得关注的是,随着物联网技术的发展,外转子电机正与智能控制芯片深度融合,通过算法优化实现能耗动态管理。例如,某些高级风扇灯产品通过外转子电机与温湿度传感器的联动,可根据环境参数自动调节风速与照明亮度,这种智能化升级不仅提升了用户体验,也为家电行业的节能改造提供了技术范本。空调压缩机使用无刷直流电机,实现节能与静音的双重优化。

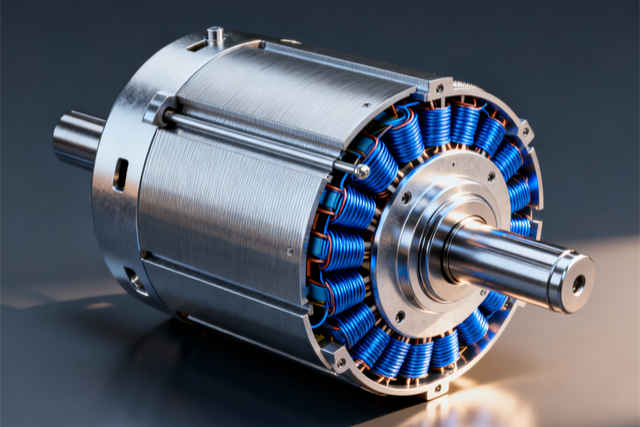
三相直流无刷电机的重要工作原理基于电磁感应定律与电子换向技术,其重要结构由定子、转子、位置传感器及电子控制器组成。定子采用三相绕组布局,通常以星形或三角形方式连接,绕组由硅钢片叠压而成以减少涡流损耗。转子为永磁体结构,常见钕铁硼材料提供强磁场,磁极对数直接影响转速与扭矩特性。工作时,直流电源通过逆变电路转换为三相交流电,按特定时序为两相绕组供电,形成旋转磁场。例如,在六步换向法中,控制器根据位置传感器反馈的转子位置,每60°电角度切换一次导通相,使定子磁场矢量以阶梯式旋转。当转子N极接近某相绕组时,该相绕组通电产生S极磁场,通过异性相吸原理驱动转子持续旋转。这种电子换向机制取代了传统有刷电机的机械电刷,消除了电火花与磨损问题,效率可达90%以上,同时通过PWM调制实现精确调速,适用于无人机螺旋桨、电动汽车驱动等高动态场景。智能健身器材阻力调节依赖无刷直流电机,提供个性化训练方案。外转子无刷直流电机厂家直供
数控机床进给系统使用无刷直流电机,确保加工过程的精确位移控制。成都300w直流无刷电机
转矩常数与反电动势常数是衡量直流无刷电机能量转换效率的重要参数。转矩常数(K_T)直接反映电机将电能转化为机械能的能力,其数值与定子绕组电流成正比。例如,当电机绕组电流为2A时,若转矩常数为0.5N·m/A,则电机可输出1N·m的转矩。这一参数在工业自动化设备中尤为重要,如传送带驱动系统需根据负载重量计算所需转矩常数,以确保电机在满载时仍能维持稳定运行。反电动势常数(K_E)则决定电机在恒定转速下的空载电压,其数值与绕组匝数、永磁体磁链强度正相关。例如,反电动势常数为0.1V/rpm的电机在转速为3000RPM时,空载电压可达300V。这一特性在电动车驱动系统中具有关键作用,当电机转速升高时,反电动势会限制电流输入,从而防止电机过载。成都300w直流无刷电机