商机详情 -
南宁直流无刷电机的选择
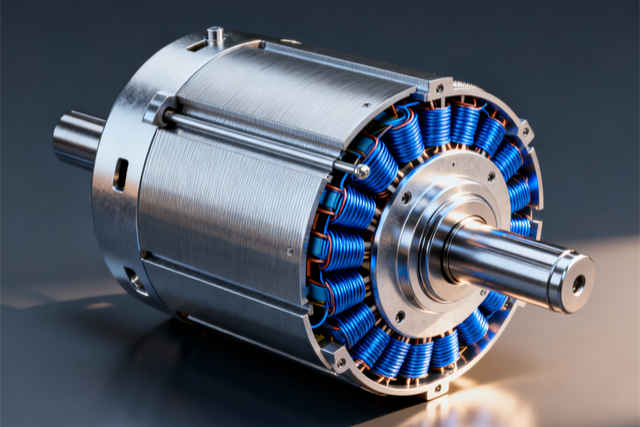
直流无刷电机的内部结构以无刷+电子换向为重要,由定子、转子与位置传感器三大模块精密协作构成。定子作为能量转换的基础,采用硅钢片叠压工艺形成铁芯,其表面开凿的定子槽内嵌有三相星形或三角形连接的电枢绕组。这些绕组通过外部电源直接供电,但电流的通断顺序由电子控制器精确调控,彻底摒弃了传统电刷的机械接触。例如,当控制器根据转子位置信号启动A相与B相绕组时,定子磁场方向会随电流变化而旋转,形成驱动转子转动的虚拟磁极。转子则由高磁能积的永磁体(如钕铁硼)与导磁材料组成,其磁极排列方式直接影响电机性能——表面贴装式(SPM)结构适合高速场景,内嵌式(IPM)结构则能提升低速转矩密度。这种永磁体与导磁材料的组合,使得转子在定子旋转磁场的作用下持续追赶磁场变化,实现高效能量转换。无刷直流电机驱动洗碗机喷淋臂,水压稳定,餐具清洁更彻底。南宁直流无刷电机的选择
从技术原理来看,分体式直流无刷电机的运行效率得益于其优化的电子换向系统。传统有刷电机通过碳刷与换向器实现电流方向切换,但摩擦损耗和电火花问题限制了效率与寿命;而无刷电机采用电子换向器(如霍尔传感器或无感算法)替代机械结构,分体式设计进一步将驱动逻辑与功率电路分离,使控制芯片能够专注于信号处理与算法优化。例如,在高速运转场景中,分体式控制器的单独散热设计可支持更高的开关频率,从而减少铁损与铜损,提升电机能效比;而在低速大扭矩场景中,通过调整驱动算法可实现更精确的转矩控制,避免传统电机因低频振动导致的噪音与磨损。这种技术特性使其在电动汽车驱动、工业机器人关节、家用电器变频控制等领域展现出明显优势,未来随着功率半导体器件性能的提升与控制算法的迭代,分体式直流无刷电机有望向更高功率密度、更智能化方向演进,成为驱动技术升级的关键组件。广西600w直流无刷电机医疗设备中的ECMO离心血泵,依赖无刷直流电机维持血液循环稳定性。

国产直流无刷电机凭借其高效、低噪、长寿命的重要优势,在近年来实现了技术突破与市场应用的双重飞跃。其重要优势源于无机械换向器的设计,通过电子控制器实现精确磁场切换,消除了传统有刷电机因碳刷磨损引发的效率衰减与维护需求。例如,在工业自动化领域,这类电机凭借高动态响应能力,可实现毫秒级转速调节,满足数控机床、智能生产线对精密控制的需求;在消费电子领域,其微型化设计(直径可低至8mm)与低功耗特性,使其成为无人机、智能穿戴设备等高集成度产品的理想动力源。技术层面,国产厂商通过自主研发的磁场定向控制(FOC)算法,将电机效率提升至90%以上,同时通过优化电磁线材料与绕组工艺,使功率密度较传统电机提高40%,在相同体积下可输出更高扭矩。
从技术演进趋势看,48V直流无刷电机正朝着高功率密度与智能化方向突破。新一代产品采用钕铁硼永磁材料,磁能积较铁氧体提升3倍,使电机体积缩小40%的同时维持相同扭矩输出。例如某型号48V/2KW电机,法兰直径只110mm,却能驱动工业机器人关节实现±0.01°定位精度。在控制层面,集成32位MCU的驱动器支持CAN/RS485双通信协议,可实时上传温度、振动、电流等12项参数至云端,配合预测性维护算法提前预警轴承磨损或磁体退磁风险。针对低速大扭矩场景,无传感器控制技术通过监测反电动势波形实现启动,省去霍尔传感器后成本降低15%,在电动自行车中置电机领域已实现批量应用。随着碳化硅功率器件的普及,48V电机系统效率有望突破95%,进一步巩固其在新能源汽车辅助驱动、无人机动力系统等高附加值市场的地位。实验室离心机通过无刷直流电机控制转速,满足样本分离的多样性需求。

大型直流无刷电机的技术突破不仅体现在性能提升,更在于其与智能化控制系统的深度融合。通过集成高精度编码器与智能驱动器,电机可实时监测转速、温度、振动等参数,并基于算法动态调整运行状态,实现预测性维护与自适应优化。例如,在大型数控机床中,电机与数控系统联动,可根据加工材料的硬度自动调节输出扭矩,避免过载损伤的同时延长刀具寿命;在风力发电领域,变桨驱动系统采用此类电机后,可快速响应风速变化,将发电效率波动控制在±2%以内。此外,其模块化设计支持多电机协同控制,在物流分拣线、智能仓储等场景中,通过分布式驱动架构实现多轴同步运动,定位精度可达±0.01毫米。随着工业互联网的发展,电机内置的通信接口可无缝接入物联网平台,实现远程监控与集群管理,为大规模设备群的能效优化提供数据支撑。未来,随着碳化硅功率器件的普及,电机的开关频率与转换效率将进一步提升,推动其在高级装备、绿色能源等领域的渗透率持续扩大。实验室DNA测序仪旋转模块依赖无刷直流电机,保障样本分析的准确性。800w直流无刷电机厂家供应
工业机器人腰部关节采用无刷直流电机,增强躯干旋转的灵活性。南宁直流无刷电机的选择
位置传感器作为电子换向的关键部件,通过实时监测转子角度实现精确控制。霍尔传感器是常见的低成本方案,其工作原理基于霍尔效应:当转子永磁体旋转至传感器附近时,磁场变化使半导体材料产生电压脉冲,每60°电角度输出一个方波信号,控制器据此判断转子位置区间。对于高精度需求场景,光电编码器或磁电编码器可提供更细致的反馈,例如1024线编码器每转输出1024个脉冲,通过A/B相正交信号可计算转速与转向,甚至通过Z相索引信号实现位置定位。无位置传感器技术则通过检测定子绕组反电动势(Back-EMF)估算转子位置,当电机旋转时,绕组切割磁感线产生的感应电压波形与转子角度直接相关,通过分析三相反电动势的过零点或相位关系,可推断换向时刻,该技术明显降低了电机成本与体积,但低速时检测精度受限。无论采用何种传感器方案,其重要目标均为确保控制器在正确时机切换绕组通电顺序,使定子磁场始终以好的角度牵引转子旋转,实现高效、平稳的能量转换。南宁直流无刷电机的选择