商机详情 -
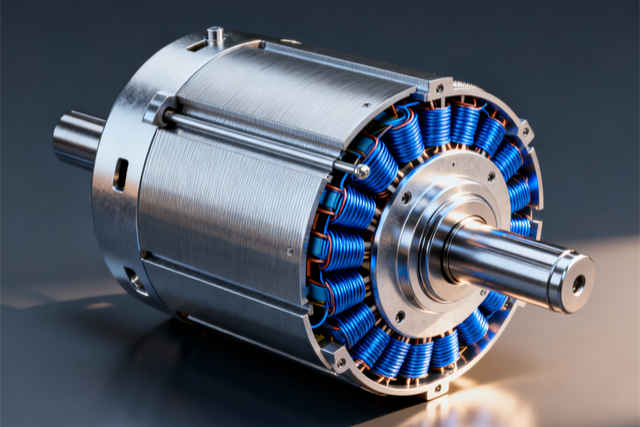
长沙直流无刷电机内部构造
直流无刷电机凭借其高效能特性在工业与民用领域占据明显优势。传统有刷电机通过电刷与换向器实现电流切换,过程中因机械摩擦产生能量损耗,而直流无刷电机采用电子换向技术,完全消除电刷摩擦损耗,能量转换效率可提升15%-20%。这一特性使其在需要长时间运行的设备中表现尤为突出,例如电动工具、家用电器及新能源汽车驱动系统,不仅降低了能源消耗,还明显减少了设备运行时的热量产生,延长了重要部件的使用寿命。此外,其高效率特性与轻量化设计形成协同效应,在相同功率输出下,直流无刷电机的体积和重量较传统电机减少30%以上,为便携式设备与空间受限的场景提供了更优解决方案。电动三轮车载货驱动用无刷直流电机,承重能力强,运行可靠。长沙直流无刷电机内部构造

电子控制器的动态调节能力是直流无刷电机实现高性能运行的关键。通过脉冲宽度调制(PWM)技术,控制器可实时调整定子绕组的等效电压,进而控制电机转速与转矩输出。当负载突变时,控制器会基于速度反馈信号快速修正PWM占空比,使电机转速波动控制在±1%以内。例如在工业自动化生产线中,输送带电机需频繁启停并保持恒定线速度,此时控制器会结合位置传感器信号与速度闭环算法,在0.1秒内完成从静止到额定转速的加速过程。对于无位置传感器的电机,控制器则通过检测未通电绕组的反电动势过零点来推断转子位置,这种方案虽精度略低,但可将系统成本降低30%。此外,现代控制器还集成了过流保护、堵转检测等智能功能,当电机温度超过120℃时会自动切断电源,确保设备在-40℃至85℃的宽温范围内稳定运行,这种特性使其成为新能源汽车驱动系统的理想选择。800w直流无刷电机供货商医疗监护仪内部散热靠无刷直流电机,保障设备长时间稳定运行。
直流无刷电机的重要参数中,极对数与KV值是决定转速特性的关键指标。极对数指转子磁极的对数,直接影响电机转速与磁场同步性。例如,极对数为4的电机在50Hz交流电下理论转速为1500RPM,而极对数增加至8时转速降至750RPM,但扭矩明显提升。这种特性使其在起重机、电动汽车等需要大扭矩的场景中表现突出。KV值则反映电机转速与电压的线性关系,其物理意义为每伏特电压对应的空载转速。例如,KV值为1000的电机在24V电压下空载转速可达24000RPM,但实际转速会因负载增加而下降。高KV值电机适合高速应用如无人机螺旋桨驱动,而低KV值电机则更适用于需要低速大扭矩的场景,如工业搅拌设备。值得注意的是,KV值与绕线匝数成反比,绕线匝数少的电机KV值高,但较高输出电流大、扭力小;反之绕线匝数多的电机KV值低,扭力大但较高转速受限。这种参数特性要求工程师在选型时需根据应用场景的转速与扭矩需求进行权衡,例如在需要快速响应的机器人关节驱动中,高KV值电机可提供更高的动态性能,而在需要精确定位的数控机床中,低KV值电机则能确保低速稳定性。
从应用领域看,高压直流无刷电机的技术优势正推动多行业向高效化、智能化转型。在工业自动化领域,其高动态响应特性(转速调节时间可缩短至毫秒级)使其成为数控机床、3D打印设备的主流驱动方案,配合闭环控制系统可实现±0.1%的转速精度,大幅提升加工效率。在新能源汽车领域,高压直流无刷电机通过集成化设计(如将驱动器与电机一体化),不仅减轻了车身重量,更通过再生制动技术将能量回收效率提升至85%以上,明显延长续航里程。在航空航天领域,其耐颠簸震动特性(振动加速度耐受值可达20g)和轻量化结构(功率密度比传统电机提高30%)使其成为无人机、卫星姿态调整系统的重要部件。随着碳化硅(SiC)功率器件的成熟,高压直流无刷电机的耐压等级已突破1000V,进一步拓展了其在轨道交通、高压压缩机等重载场景的应用潜力。未来,随着人工智能算法与电机控制技术的深度融合,高压直流无刷电机将向更高功率密度、更精确控制的方向发展,成为工业4.0时代的关键基础设施。小型船舶推进系统配无刷直流电机,航行灵活,适合短途航行。
直流无刷电机凭借其高效能特性在工业与民用领域占据明显优势。传统有刷电机因碳刷与换向器的机械摩擦会产生能量损耗,而直流无刷电机通过电子换向器替代机械结构,彻底消除了摩擦损耗,使电机效率普遍提升15%-30%。这种效率提升直接转化为能耗降低,在长期运行的设备中可明显减少电力成本。例如,在需要持续运转的通风系统或水泵中,采用直流无刷电机每年可节省数百至数千度电能。此外,其能量转换效率的提升也意味着发热量的减少,电机温升更低,从而延长了绝缘材料与轴承的使用寿命,降低了维护频率与停机风险。这种高效低耗的特性使其成为新能源设备、电动汽车及智能家居领域的理想选择,尤其在需要精确调速的场景中,其效率优势更为突出。输液泵用无刷直流电机输送药液,剂量控制精确,误差范围极小。黑龙江直流无刷电机应用
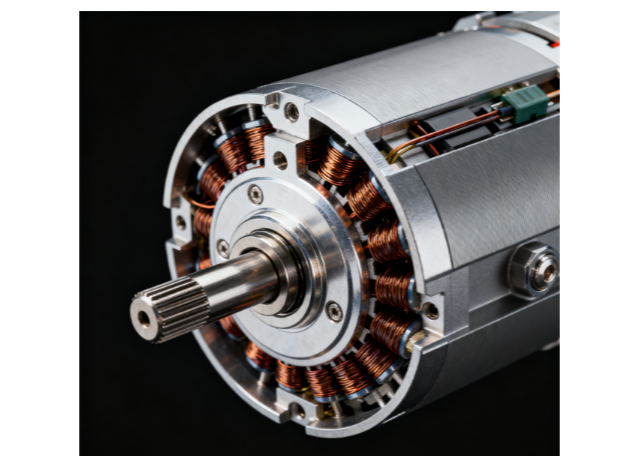
绿篱机等园林工具用无刷直流电机,切割顺畅,续航时间较长。长沙直流无刷电机内部构造
随着控制算法与硬件技术的演进,直流无刷电机的控制策略正从传统方波驱动向高精度矢量控制升级。传统六步换向虽结构简单,但存在转矩波动大、低速性能差等问题,而磁场定向控制(FOC)通过坐标变换将三相电流解耦为直轴与交轴分量,分别控制磁通与转矩,实现类似直流电机的动态响应。例如,在工业机器人关节驱动中,FOC算法可结合编码器反馈,将电机转矩波动控制在±1%以内,满足高精度轨迹跟踪需求。此外,无传感器控制技术通过反电动势过零检测或高频信号注入法,省去了物理位置传感器,降低了系统成本与体积,适用于吸尘器、无人机等对空间敏感的场景。当前,全集成驱动芯片已将功率器件、预驱动电路与FOC算法硬件化,进一步简化了开发流程,推动直流无刷电机向高转速、高效率方向突破,例如在航模电机中实现78万转/分钟的电气转速,展现了电子控制技术对电机性能的深度赋能。长沙直流无刷电机内部构造