商机详情 -
工业TOYO东佑达电动缸功能
直线模组的选型可参照下面的步骤:1.确定直线模组滑台的使用环境:根据使用环境判定为一般环境,洁净环境,恶劣环境?2.确定直线模组滑台安装方向。确定模组滑台为水平安装,臂挂安装或垂直安装。3.确定直线模组滑台搬运的负载。4.核算直线模组滑台运行的速度和加速度。5.直线模组滑台的容许力矩校核:计算静止(匀速)状态下和加减速状态下的各向力矩值:Ma,Mb,Mc。6.直线模组滑台的精度等级要求:明确需要的重复定位精度,行走平行度要求等。7.确定马达安装样式:常用的直线模组滑台安装方式有直连型,马达左侧安装,马达右侧安装,马达底侧安装等8.直线模组滑台行程限位开关方式。9.确定直线模组滑台的电机规格和功率。直线模组滑台的性能指标可以从以下方面进行衡量。直线模组滑台的精度特性:包含重复定位精度、定位精度、行走平行度、行走直线度、背隙等。直线模组滑台的运动特性:可搬运重量、抗力矩能力、运行速度、加速度、运行噪音等。TOYO模组产品种类丰富,可多型号搭配使用,可以提供**安装调试。工业TOYO东佑达电动缸功能
TOYO
在计算直线电机的负载力时,首先要确定直线电机的运动曲线,了解直线电机和放大器的负载要求和负载能力。由于运动曲线可以计算出比较大速度和比较大加/减速度。根据给定的载荷,可以匀速计算出所有推力,利用曲线可以计算出减速时所有动态推力。选择直线电机后,可以将电机各种运动的部件的重量加到运动重量中,计算总峰值推力和总平均推力。电机应能输出计算的峰值推力,计算的平均推力应高于电机的持续推力,以保证安全的范围。除了这些还应计算线圈温升,以确保线圈低于预期的比较高温升。还可以计算比较大的母线电压以及连续电流和峰值电流,以便于所选的进行比较,以确保实现计算的性能。自动化TOYO东佑达电动滑台TOYO模组具有垂直和水平多种方式安装。
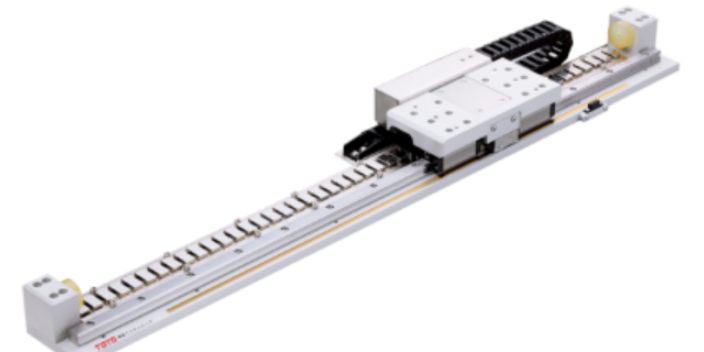
模组具体的作用是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。已用于各种各样的精密仪器、机械设备。只要包括加工机械设备、自动机械化、精密工具、半导体机械、机器人、运输器械等等。TOYO模组产品分有很多种类型,每款产品的功能及特色都各不相同,TOYO模组常见有丝杆型模组和同步带模组,丝杆模组又可分为开放式和无尘式,同步带模组同样可分为开放式和无尘式。开放式同步带TOYO模组,这种模组可完成长距离的传动及运送且有同步带替代滚珠丝杆,这种型的TOYO模组常常运用在主动焊接节割及点胶、转移、上下料等设备上操作。
7.非标自动化视觉在线测量仪TOYO模组非标自动化视觉在线测量仪是可以实现自动化在线测量,判断,分类的一体化设备。操作时只需将产品放入流水线传送带,自动感应,机器会完成自动检测,一次性自动完成工件所有位置尺寸的测量。运用TOYO模组,速度快定位精度高,操作简单;对于复杂工件,需一键即可实现快速测量,极大地提高了测量效率。8.点胶机-点胶机械手TOYO模组点胶机直接将产品放入料盘上滴胶可以对产品进行打点、走直线、画圆弧、不规则曲线功能。点胶精度高速度快:生产出的产品表面非常干净。视觉点胶工作台是龙门式运动结构,平台不运动,多轴组合搭配使用,Y轴在运动,产量更高,性能更稳定。9.涂装-涂装机械手TOYO模组涂装,注意喷涂过程中着色一致重要;在涂饰生产线上为了保证涂装的一致性,需要采用具有稳定性强的部件进行操作,TOYO模组结构紧凑,简单可搭配多轴配合使用,可增加涂装的稳定性和着色的一致性。TOYO直线模组的好处有缩短上市时间并缩短设置时间。
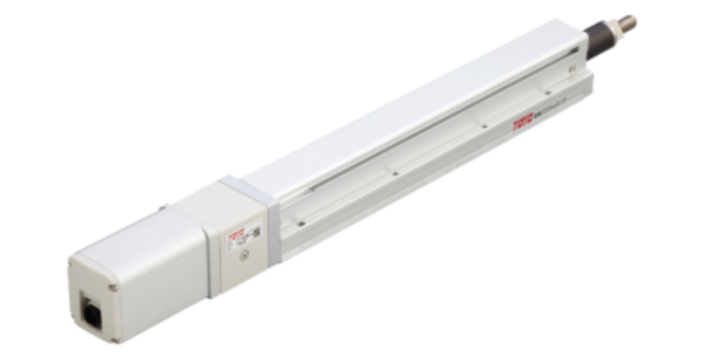
CPSG 系列整體尺寸與同類型電動缸相比縮小約50%以上,設備導入空間占比低,適合小型精密設備使用。本體結構採鋼材直接研磨加上專利內嵌滾珠滑軌設計,降低高度並減輕體積重量,提升精度及直線度、平面度外,對環境也更環保、節能,降低碳排放。專為直線傳動需求而設計,透過搭載多種治具的變化,應用在電子零件或機械零件之檢測、組立、搬運、螺絲鎖付、點塗膠或銲錫等工站,且因應工廠生產設備大型化與設備搬運速度高速化的演進,滿足市場上受空間限制、高速、高精度的要求。維持現代化設備體積小,與同質性商品相比推力增加2至3倍,是目前業界體積**小的軸棒多動子線馬電動缸產品。TOYO丝杆系列模组多运用于工作定位、夹取、搬运、插件等产能自动化。智能TOYO东佑达机器人华东总代理
TOYO直线模组与直线电机都属于自动化传动元件,能够实现直线运动,外观上看起来差不多。工业TOYO东佑达电动缸功能
1、PLC连接所有控制部工件到位的信号2、PLC将转台到位信号传给机器人,机器人通过视觉认知系统开始进行识别3、识别OK,视觉引导机器人开始对焊接好的管路进行抓取放置,重复此动作两回4、机器人完成取物动作,开始向弯管送料机构移动,到位发信号给PLC5、PLC收到信号给送料机构和转台,转台旋转,送料机构推动向机器人抓手处送出弯管,抓手接触弯管并卡紧7、卡紧后机器人去移动抓取管接头8、**的抓取机构抓到管接头,机器人先进行粘胶移动9、粘胶后**抓取机构旋转180°并开始与弯管下端部进行对接(同心)10、对接完成机器人开始识别待机焊接台进行擦管,**后发信号给PLC,PLC给弯管固定机构信号,夹爪锁死弯管,机器人松开移走11、重复此取管、对接、插管动作1次完成一个整个节拍12、机器人发信号给PLC,PLC告知旋转台转动工业TOYO东佑达电动缸功能