商机详情 -
温州船用配电由哪些构成
液货舱船用配电系统的维护保养方法-日常检查
外观检查:
每天检查配电设备的外观,包括主配电板、分配电板、配电箱和控制箱等。查看外壳是否有损坏、变形、腐蚀或油漆剥落等情况,确保设备的防护性能良好。检查电缆的外部绝缘层是否有破损、老化、龟裂或被油、化学品污染的迹象,特别要注意液货舱附近电缆的情况。
连接部位检查检查:
电气连接部位,如接线端子、插头、插座等,确保连接牢固,没有松动、氧化或过热变色的现象。松动的连接可能导致接触电阻增大,产生过热甚至引发火灾。查看电缆桥架和穿线管内的电缆是否有移位、挤压或磨损的情况,保证电缆敷设整齐且无外力损伤。 船用配电设备服务,就选无锡宏智铭科技,让您满意,有想法可以来我司咨询!温州船用配电由哪些构成

航行信号灯控制箱的信号控制参数:
通道数量:根据船舶的大小和航行灯、信号灯的配置需求,控制箱的通道数量会有所不同。小型船舶的控制箱可能有十几个通道,大型船舶的则可能多达几十个甚至上百个通道。例如,有的控制箱有 26 路航行灯通道和 20 路信号灯通道。控制方式:包括手动控制和自动控制。手动控制可以通过控制面板上的按钮、开关等操作来单独控制每一路信号灯的开启、关闭和调光;自动控制则可以根据船舶的航行状态(如进出港、航行、停泊等)自动切换信号灯的状态。调光范围和精度:调光范围一般为 0% 至 100%,可以根据实际需求对信号灯的亮度进行调节。调光精度则表示在调节亮度时的较小调节幅度,例如可以精确到 1% 或更高的精度。闪光灯频率:对于需要设置闪光灯的信号灯,控制箱应能控制闪光灯的闪烁频率,一般在每分钟几十次到几百次不等,并且频率应可调节 南昌船用配电怎么做无锡宏智铭科技为您提供船用配电设备,有想法的不要错过哦!
航行信号灯控制箱的环境适应性参数:
工作温度:通常在 - 20℃至 + 55℃之间,或者根据具体的船舶航行区域和使用环境,有更特殊的温度要求。比如在极寒地区航行的船舶,控制箱可能需要具备在更低温度下正常工作的能力。储存温度:一般在 - 40℃至 + 70℃之间,以保证控制箱在长时间不使用或运输、储存过程中不会因温度问题而损坏。防护等级:至少达到 IP54 及以上,能够有效防止灰尘、水溅等对控制箱内部电路的影响。对于安装在露天甲板等恶劣环境下的控制箱,防护等级可能需要更高,如 IP66、IP67 等,以确保在恶劣的海洋环境中可靠运行5。抗振动和冲击能力:由于船舶在航行过程中会产生持续的振动和可能的冲击,控制箱需要具备一定的抗振动和冲击能力,例如能承受加速度为 Xg(X 为具体的数值,如 5g、10g 等)的振动和一定能量的冲击1。盐雾、油雾和霉菌防护:在海洋环境中,盐雾、油雾和霉菌对设备的腐蚀和损害较大,控制箱应具备相应的防护措施,以保证在这种环境下的长期使用
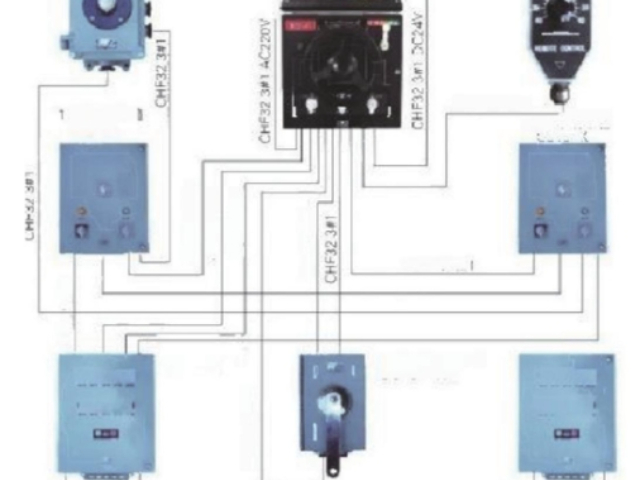
船用组合起动器的特殊功能:
应急操作功能
在船舶发生紧急情况(如主电源故障)时,船用组合起动器可能需要具备应急操作功能。例如,对于一些保障船舶安全的关键设备(如消防泵、应急发电机等)的电动机,其组合起动器能够在应急电源(如蓄电池)的供电下进行启动操作,确保船舶在紧急状态下能够维持基本的运行和安全保障。
远程控制和监测功能
现代船舶越来越多地采用自动化和集中监控系统。船用组合起动器往往具备远程控制和监测功能,可以通过船舶的中部控制台或网络系统对起动器进行远程操作(如启动、停止、切换等),并且能够将起动器的工作状态(如运行电流、电压、故障信号等)实时传输到监控中心,便于船员及时了解和管理船舶电气设备。 无锡宏智铭科技的船用配电设备服务,欢迎咨询了解!
航行信号灯控制箱安装与维护要求:
安装位置
航行信号灯控制箱通常安装在船舶驾驶室或紧邻驾驶室的位置,这样便于船员操作和观察。它应该安装在干燥、通风良好的地方,避免受到海水、雨水和潮湿空气的侵蚀。同时,安装位置要考虑到方便与船舶的电气系统进行连接,减少线路长度,降低线路损耗和故障概率。
日常维护
定期检查控制箱的外观,查看是否有损坏、变形或腐蚀的情况。清洁控制箱表面的灰尘和杂物,保证散热良好。检查控制面板上的按钮和旋钮是否灵活可靠,如有卡滞现象应及时修复或更换。定期测试各个信号灯的功能,包括开启、关闭、亮度调节和信号切换等操作。同时,检查故障检测和报警功能是否正常,确保在信号灯出现故障时能够及时发出警报。对控制箱内的电器元件,如继电器、接触器、电源模块等进行定期维护。检查继电器和接触器的触点是否有烧蚀现象,如有需要进行打磨或更换;检查电源模块的输出电压是否稳定,对保护装置进行功能测试,确保其在需要时能够正常动作。 船用配电设备服务,就选无锡宏智铭科技,用户的信赖之选,欢迎新老客户来电!温州船用配电由哪些构成
船用配电设备服务,就选无锡宏智铭科技,让您满意,欢迎新老客户来电!温州船用配电由哪些构成
自动操舵仪的重要操作原理是基于反馈控制理论。其主要目的是通过不断监测船舶的实际航向,并与设定的目标航向进行比较,然后根据偏差来调整舵角,使船舶保持在预定航向上。
主要组成部分及其原理
传感器
电罗经和磁罗经:电罗经和磁罗经用于测量船舶的实际航向。电罗经通过测量地球自转角速度和重力加速度来确定船舶的真方位,精度较高;磁罗经则是利用地球磁场来指示方向。这些罗经所测得的航向数据会被传送给自动操舵仪的控制单元。GPS(全球定位系统):GPS用于确定船舶的地理位置。通过连续获取船舶的位置信息,自动操舵仪可以计算出船舶的实际航向,并与目标航向进行对比。GPS信号提供了较为精确的位置和速度信息,有助于提高自动操舵的精度。
控制单元:信号处理与比较、舵角计算
执行机构
舵机系统:计算得出的舵角指令会被传送给舵机系统。舵机系统根据指令驱动舵叶转动相应的角度。例如,如果船舶的实际航向偏左,控制单元计算出需要向右转动一定角度的舵角,舵机系统就会将舵叶向右转动,使船舶向右转向,从而纠正航向偏差。 温州船用配电由哪些构成