商机详情 -
临汾矿车盲区360全景设计
由于运输车安全进出工房装卸产品的时经常发生碰撞。运输车辆在进出工房大门时,车辆两侧存在视觉盲区,以往依靠辅助人员提示进行作业,但因环境狭窄且环境噪音大,辅助人员视线容易受阻,导致司机难以完全掌握周围状态,存在碰撞风险。该系统主要用于保证车上产品的运输安全。特种车360驾驶辅助系统在车辆运输过程中与周围环境小于安全距离时能够自主预警(包括车辆顶部的安全距离预警),避免司机因环境状态未知而出现的碰撞事故。系统通过安装在车身周围前后左右的 4 个超广角、高清夜视摄像头,实时采集车身四周的高清视频画面,在图像处理器中经过360算法畸变矫正、图像拼接和融合等处理,终合成车身周围 360°的鸟瞰全景画面,并显示在车载显示屏上,为司机提供 360°全景驾驶辅助。矿山作业环境恶劣,佳兴伟诚矿车 360 度全景环视驾驶辅助系统为驾驶员提供清晰视野。临汾矿车盲区360全景设计
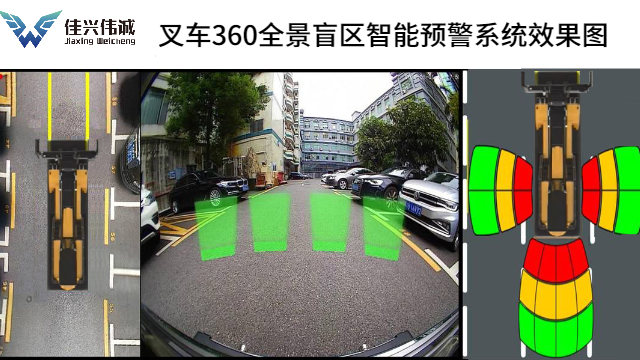
大型车辆因体积庞大、驾驶视野受限,盲区引发的安全事故频发,360 度全景盲区无死角监测预警系统的出现,为解决这一难题提供了高效方案。该系统通过在车辆前后左右部署多枚超广角高清摄像头,采集集车身周围的环境影像,经先进的图像拼接与畸变矫正技术处理,在驾驶室内的显示屏上生成 360 度无死角的全景鸟瞰图,让驾驶员能清晰掌握车辆周边状况,彻底消除传统驾驶中的视觉盲区。系统不具备全景可视化功能,还集成了智能监测与预警机制。借助 AI 算法,它能识别行人、非机动车及其他障碍物,当检测到物体进入危险区域时,立即通过声音报警、灯光闪烁等方式提醒驾驶员,部分系统还可联动车辆制动系统,实现紧急减速或停车,大限度降低碰撞风险。此外,该系统支持全天候工作,在雨雪等恶劣天气下,通过红外夜视技术和抗干扰算法,仍能保持稳定的监测能力。同时,其内置的行车记录功能可全程存储视频数据,为事故追溯和责任认定提供有力证据,也为驾驶员的日常操作规范提供参考依据。临汾矿车盲区360全景设计佳兴伟诚 360 全景系统的连接线束采用耐高低温材料,在极端温度环境下仍能保持良好性能。
工程车360全景盲区监测预警系统以多传感器融合技术为关键,通过4-6个超广角高清摄像头(视角达210°)覆盖车辆前后左右盲区,结合毫米波雷达或超声波雷达实现环境感知冗余。摄像头通常部署于后视镜下侧、保险杠上方及车身侧面,支持IP6K9K级防水防尘,适应工地扬尘、暴雨等恶劣环境。系统搭载的AI视觉处理单元采用低延迟算法(响应时间<200ms),可实时拼接多路影像生成360°全景鸟瞰图,并通过深度学习模型识别行人、车辆及障碍物。以佳兴伟诚科技研发的方案为例,其系统通过4路BSD(盲点监测)摄像头与AI算法结合,能检测5-7米范围内移动目标,并在车载显示屏上以红框标注危险区域,同时触发分级声光报警(车内90-120dB蜂鸣器+车外红蓝爆闪灯)。部分型号还集成驾驶员疲劳监测模块,通过DMS摄像头分析眼部动作,当检测到闭眼或低头超3秒时,立即发出语音警示,形成“人-车-环境”三位一体防护体系。
佳兴伟诚工程车360全景驾驶辅助系统由工程车预警终端、AI摄像头、声光报警器、驾驶员语音提示器、超声波雷达(可选)组成 ,工程车前、后、左、右各安装一台AI摄像头来采集车辆周围的数据,通过主机的算法处理终在显示屏上呈现出一个360度画面和作业范围图片,当工程车在作业时有人闯到车辆周围设定区域,AI摄像头会立即捕捉人员并放大呈现到显示屏幕上,另外驾驶员语音提示器会播报闯入人员的方位,例如“左侧有人,请注意!;左前方有人,请注意!”,同时车外声光报警器会播报“作业区域危险,请远离”;如果选配超声波雷达,雷达预警会叠加到视频画面上进行预警,这样能极大的避免因工程车作业时盲区有违规人员闯入而造成危险事故。工程车360全景监测系统为驾驶员打造出车辆周边 360 度无死角的全景视野。

佳兴伟诚的车辆 360 全景系统,宛如为车辆配备了无死角的的 “电子眼”。系统在车辆前后左右巧妙安置四个高清广角摄像头,这些摄像头如同忠诚卫士,时刻紧密监控车辆周边环境。当车辆启动瞬间,摄像头迅速开始工作,捕捉到的图像信息被飞速传输至系统的处理单元。处理单元恰似一位技艺精湛的大师,运用先进算法,对这些图像进行无缝拼接与矫正。接着,一幅清晰、完整的车辆四周 360 度全景画面便在车内显示屏上完美呈现,让驾驶员仿佛拥有 “上帝视角”,对车辆周围情况了如指掌。大尺寸高清显示屏,操作简单直观,佳兴伟诚特种车 360 全景系统方便驾驶员使用。临汾矿车盲区360全景设计
开发轻量化客户端,管理人员通过手机 APP 即可查看多台工程车的 360 全景实时画面和运行数据,实现移动化管理。临汾矿车盲区360全景设计
佳兴伟诚深耕车载安全领域多年,其工程车360全景盲区监测预警系统以“无死角监控+AI智能预警”为关键,通过车身四周部署的4路210°超广角高清摄像头,实时采集车辆周围环境图像。系统采用自主研发的图像畸变矫正算法与深度学习技术,将多路影像无缝拼接成360°全景鸟瞰图,消除传统后视镜盲区。在复杂施工场景中,驾驶员可直观观察车身四周5米范围内的行人、车辆及障碍物,配合毫米波雷达的远距离探测能力,实现“视觉+雷达”双模态感知。该系统已成功应用于泥头车、搅拌车、推土机等20余类工程车辆,在前海建设工地实测中,盲区事故率下降82%,成为行业安全标准升级的标准案例。临汾矿车盲区360全景设计