商机详情 -
深圳冲床上下料机器人市价
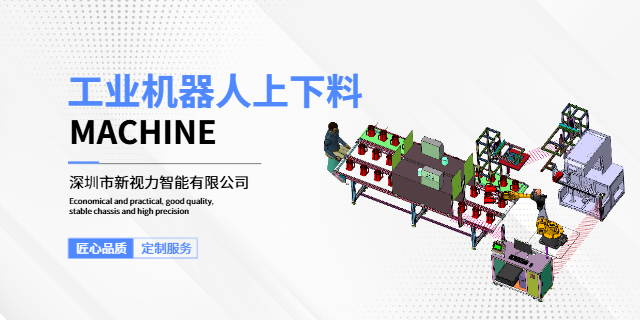
上下料搬运机器人的工作原理:上下料搬运机器人的工作原理主要基于机械传动、控制系统、传感器、执行器和视觉系统的协同作用。机械传动系统通过关节、齿轮、链条等部件实现机器人手臂、手爪等运动部件的灵活运动。控制系统作为主要部分,负责接收和处理外部指令,并通过驱动电机和执行器实现各种动作。传感器则用于检测周围环境信息,如距离、速度、重量等,确保机器人能够准确地进行搬运、抓取和放置操作。部分机器人还配备了视觉系统,通过摄像头和图像处理器实现物体识别、定位和导航等功能。机器人精确抓取物料,确保生产流程稳定。深圳冲床上下料机器人市价
安全性与人机协作:多重安全防护:配备激光雷达、防撞条、急停装置等,实时监测行人和障碍物,保障人机共融安全。灵活部署:无需围栏或轨道,支持快速切换产线任务,适应小批量多品种生产需求。智能化与扩展性:系统集成能力:通过专门使用信号与CNC设备联动,实现自动开门、启动加工等流程,减少通信延迟。数据驱动优化:采集生产数据并反馈至管理系统,支持动态调整生产计划,提升整体协同效率。复合机器人通过“移动+操作+感知”的一体化设计,解决了传统机器人灵活性差、依赖人工干预等问题,成为CNC加工智能化升级的主要工具。其优势在汽车零部件、精密模具等场景中已得到验证。珠海码垛上下料机器人市场价格末端执行器的布局影响机器人抓取不同方位物料的灵活性。
安全性:安全是生产的首要前提,自动上下料机器人在工作过程中可能会与人员、设备发生碰撞,因此必须具备良好的安全性能。机器人应配备多种安全保护装置,如碰撞传感器、急停按钮、安全围栏等。当机器人检测到异常情况时,能够及时停止运动,避免事故的发生。同时,机器人的控制系统要具有安全逻辑功能,能够对机器人的运动进行实时监控和限制,确保机器人的操作安全。此外,机器人的设计和制造要符合相关的安全标准和规范,如 CE 认证、ISO 标准等。在使用机器人之前,企业要对操作人员进行安全培训,提高他们的安全意识和操作技能。
机械构造及特性:模块化设计:上下料机器人通过模块化设计,能够灵活地进行各种组合,从而构建出多台联机的生产线。其关键组件包括立柱、横梁(X轴)、竖梁(Z轴)、控制系统、上下料仓系统以及爪手系统等。这些模块在机械结构上相互单独,同时又能在一个预定的范围内自由组合,使得机器人能够适应车床、加工中心、插齿机、电火花机床、磨床等多种设备的自动化生产需求。安装调试便捷性:在安装调试方面,上下料机器人可以与加工机床分开进行,这样机床部分只需采用标准机即可。机器人本身是一个单独的实体,即使在客户现场,也可以对已购机床进行自动化改造和升级。简言之,当机器人出现故障时,只需对机器人进行相应的调整或维修,而不会干扰到机床的正常运行。准确设置抓取力度,能避免物料变形且确保抓取牢固。
管控困难:①. 人工操作可能导致产品质量的不稳定,人会产生疲劳,注意力不集中影响质量和生产进度。②.岗位员工过多很难管控,容易出现工作流程混乱状况。③.生产线上的工人可能面临各种安全风险,如机械伤害、化学危害等,缺乏先进的安全设备和措施,使得生产线的安全性得不到充分保障。缺少灵活性:①.传统的生产线往往针对特定的产品或生产流程设计,缺乏灵活性,难以适应产品种类的变化或生产需求的快速调整。②.改变生产线配置和工艺需要较长的时间和较高的成本。设备停机后需对机器人进行防锈、防潮维护。湖州上下料机器人参考价
机器人抓取范围广,适应多种工件。深圳冲床上下料机器人市价
灵活性和适应性:现代制造业的产品种类繁多,生产工艺不断变化,因此自动上下料机器人需要具备良好的灵活性和适应性,能够快速适应不同的生产任务和工作环境。灵活性体现在机器人的关节自由度和工作范围上。关节自由度越多,机器人的动作越灵活,能够完成更加复杂的抓取和放置动作。工作范围大的机器人可以覆盖更多的工作区域,减少机器人的移动和调整次数。例如,关节式机器人具有较高的灵活性,能够适应各种复杂的工作场景;而桁架式机器人则适用于工作范围固定、作业流程相对简单的场景。适应性则体现在机器人对不同工件的抓取能力和对环境变化的适应能力上。机器人应配备多种不同类型的抓手,能够抓取各种形状、尺寸、材质的工件。同时,机器人要能够在不同的温度、湿度、灰尘等环境条件下正常工作,具有良好的防护性能和抗干扰能力。深圳冲床上下料机器人市价