商机详情 -
QAM16mesh自组网升级
智能交通系统对车辆间协同通信提出高要求,Mesh自组网通过车路协同技术提升道路安全与通行效率。在车联网场景中,车载Mesh节点与路侧单元形成动态网络,实时交换车速、位置及路况信息。节点采用TDMA时分多址机制避免数据碰撞,确保紧急制动指令的优先传输。当车辆进入通信盲区时,中继节点通过多跳路由维持信息连续性,避免传统DSRC技术的距离限制。此外,Mesh网络可集成边缘计算能力,对本地交通数据进行预处理,减少中心网传输压力。在高速公路场景中,节点通过功率自适应技术穿透雾天等恶劣天气,保障指令的可靠交付。气象Mesh自组网校准雷达拼图数据精度。QAM16mesh自组网升级
海洋探索领域依赖Mesh自组网实现跨海域稳定通信。部署于浮标、无人艇及潜航器的节点形成海上动态网络,通过长距低功耗协议扩展通信距离。在跨海岛通信场景中,Mesh网络可构建岸基-岛礁-舰船的多层链路,实现语音、视频及雷达信号的跨海传输。节点采用跳频扩频技术抵御敌方干扰,并结合网络编码技术提升传输可靠性。即使部分节点因海况恶劣失效,剩余节点仍能通过备用路径维持通信链路。此外,Mesh自组网支持与卫星系统的互联,形成天地一体化监测体系,助力海洋资源开发。IP65mesh自组网中心物流Mesh自组网调度跨境运输车辆。

环境监测领域,Mesh自组网为偏远地区生态研究提供数据采集手段。部署于森林、沙漠或极地的节点形成低功耗广域网络,长期监测气象、水文及生物活动数据。节点采用太阳能与风能混合供电,结合休眠调度机制延长使用寿命。在野生动物追踪场景中,Mesh网络可接收动物佩戴的传感器信号,并通过中继节点将数据回传至研究基地。网络支持地理围栏功能,当动物跨越预设区域时触发警报。此外,Mesh自组网可与卫星遥感数据融合,构建多源异构监测体系,为生态保护决策提供科学依据。
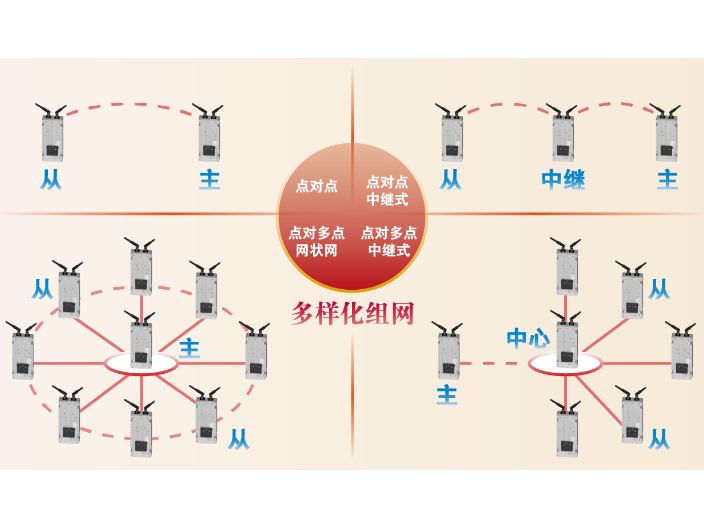
Mesh自组网是一种基于动态路由协议构建的分布式无线通信网络,其中心优势在于无需依赖固定基础设施即可实现节点间的自动组网与数据传输。该网络采用OFDM与MIMO技术结合的设计,通过多天线配置(2T2R)提升信号传输的稳定性和覆盖范围。在工业环境中,Mesh自组网可部署于机器人集群控制场景,例如自动化仓储中的AGV小车协同作业。节点间通过多跳传输扩展通信距离,同时利用QPSK、QAM16等调制方式优化频谱效率,确保控制指令与传感器数据的实时交互。其网络协议兼容UDPTCP/IP,支持TTL、RS232及USB等多种物理接口,适配不同设备的接入需求。此外,Mesh自组网的自愈合特性可在部分节点失效时自动重构路由,维持网络连通性,适用于高可靠性要求的工业场景。航天Mesh自组网实现测控站数据中继。
环境监测系统利用Mesh自组网实现偏远区域数据采集。部署于森林、沙漠或极地的节点通过太阳能供电,结合低功耗设计延长工作周期。网络采用COFDM技术抵抗多径干扰,确保气象参数、水文数据及生物活动信号稳定传输。在野生动物保护场景中,Mesh节点可接收动物携带的定位标签信号,并通过多跳中继将数据回传至研究基地。其地理围栏功能可在动物跨越预设区域时触发警报,辅助生态保护决策。此外,网络支持与卫星遥感数据融合,构建多维度环境监测体系,为气候变化研究提供数据支撑。医疗Mesh自组网共享电子病历数据。铲煤机mesh自组网费用
车载Mesh自组网实现编队车辆实时数据共享。QAM16mesh自组网升级
Mesh自组网全方面支持UDP/TCP/IP协议栈,为多媒体业务传输提供标准化承载平台。UDP协议适用于实时性要求高的视频流传输,通过前向纠错与数据包重传机制保障画面流畅性;TCP协议则用于关键控制指令的可靠传输,确保指令准确抵达目标节点。例如,在无人机编队飞行中,领航机通过TCP连接向从机发送姿态调整指令,同时利用UDP多播实时分享航拍视频,两种协议的协同工作既保证了控制精度,又优化了带宽利用率。在工业机器人集群作业中,Mesh自组网构建了去中心化的控制网络。每台机器人搭载Mesh模块作为网络节点,通过空间分集接收技术维持与邻近节点的稳定连接。当某台机器人因障碍物遮挡导致信号中断时,周围节点自动接管数据转发任务,确保控制指令的连续传递。例如,在自动化仓储场景中,AGV小车通过Mesh网络接收调度指令,并实时共享货物位置信息,即使部分节点失效,整个系统仍能通过动态路由重构维持运作效率。QAM16mesh自组网升级