商机详情 -
南京组装线性马达设计
有三种类型的平板式线性马达(均为无刷):无槽无铁芯,无槽有铁芯和有槽有铁芯。选择时需要根据对应用要求的理解。无槽无铁芯平板电机是一系列coils安装在一个铝板上。由于FOCER没有铁芯,电机没有吸力和接头效应(与U形槽电机同)。该设计在一定某些应用中有助于延长轴承寿命。动子可以从上面或侧面安装以适合大多数应用。这种电机对要求控制速度平稳的应用是理想的。如扫描应用,但是平板磁轨设计产生的推力输出比较低。通常,平板磁轨具有高的磁通泄露。所以需要谨慎操作以防操作者受他们之间和其他被吸材料之间的磁力吸引而受到伤害。江苏线性马达选购购就找苏州尚恩格!南京组装线性马达设计
初级绕组利用率高。在管型直线感应电机中,初级绕组是饼式的,没有端部绕组,因而绕组利用率高。无横向边缘效应。横向效应是指由于横向开断造成的边界处磁场的削弱,而圆筒型线性马达横向无开断,所以磁场沿周向均匀分布。容易克服单边磁拉力问题。径向拉力互相抵消,基本不存在单边磁拉力的问题。易于调节和控制。通过调节电压或频率,或更换次级材料,可以得到不同的速度、电磁推力,适用于低速往复运行场合。适应性强。线性马达的初级铁芯可以用环氧树脂封成整体,具有较好的防腐、防潮性能,便于在潮湿、粉尘和有害气体的环境中使用;而且可以设计成多种结构形式,满足不同情况的需要。高加速度。这是线性马达驱动,相比其他丝杠、同步带和齿轮齿条驱动的一个***优势。精度方面:线性马达因传动机构简单,定位精度、重复精度,通过位置检测反馈控制都会较“旋转伺服电机滚珠丝杠”高,且容易实现。线性马达定位精度可达2μm,甚至更高。而“旋转伺服电机滚珠丝杠”比较高只能达到10μm。苏州自动下料线性马达苏州线性马达选购就找苏州VEILS!
目前,线性马达在工业设备中的应用,主要在机床行业比较突出,近几年,国际上对数控机床上采用线性马达显得特别热,其原因是传统机床的驱动装置依赖丝杆驱动,但是滚珠丝杆驱动本身也有自己的缺点,比如:长度限制、机械间隙、摩擦、扭曲等等,而线性马达不无此缺点,且结构简单,精度是丝杆的10倍甚至20倍,加速度是其20倍以上。线性马达作为近代工业发展的一种新的驱动方式和伺服直线元件,可大面积应用于交通运输、工业设备、家用电器、工业和医疗卫生等各个领域,其具有广阔的应用和发展前景。
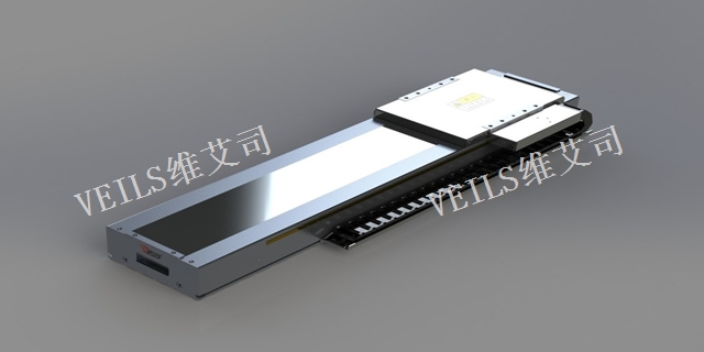
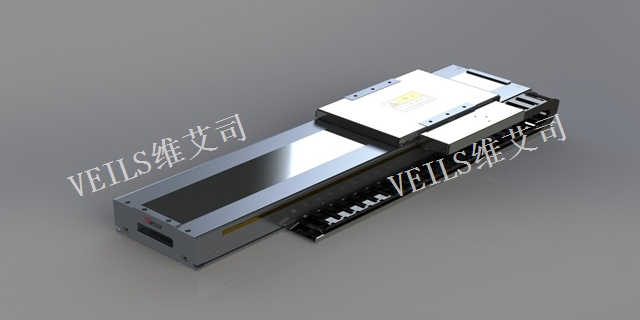
维艾司品牌下的线性马达分为:U型槽线性马达,圆筒型线性马达和平板型线性马达。其中有平板式线性马达还可分为(均为无刷):无槽无铁芯,无槽有铁芯和有槽有铁芯。选择时需要根据对应用要求的理解。无槽无铁芯平直线板电机是一系列coils安装在一个铝板上。由于FOCER没有铁芯,电机没有吸力和接头效应(与U形槽电机同)。该设计在一定某些应用中有助于延长轴承寿命。动子可以从上面或侧面安装以适合大多数应用。这种电机对要求控制速度平稳的应用是理想的。如扫描应用,但是平板磁轨设计产生的推力输出比较低。通常,平板磁轨具有高的磁通泄露。所以需要谨慎操作以防操作者受他们之间和其他被吸材料之间的磁力吸引而受到伤害。管状线性马达选型就找苏州VEILS!
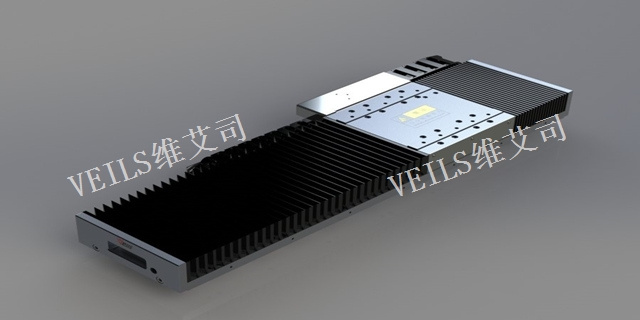
圆柱形动磁体线性马达动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是初发现的商业应用但是不能使用于要求节省空间的平板式和U型槽式线性马达的场合。圆柱形动磁体线性马达的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成的,使用霍尔装置实现无刷换相。推力线圈是圆柱形的,沿磁棒上下运动。这种结构不适合对磁通泄漏敏感的应用。必须小心操作保证手指不卡在磁棒和有吸引力的侧面之间。管状线性马达设计的一个潜在的问题出现在,当行程增加,由于电机是完全圆柱的而且沿着磁棒上下运动,***的支撑点在两端。保证磁棒的径向偏差不至于导致磁体接触推力线圈的长度总会有限制。江苏线性马达选购购就找苏州维艾司!上海搬运机器人线性马达厂家
U 型槽式线性马达选型就找苏州尚恩格!南京组装线性马达设计
对直线电机控制技术的研究基本上可以分为三个方面:一是传统控制技术,二是现代控制技术,三是智能控制技术。传统的控制技术如PID反馈控制、解耦控制等在交流伺服系统中得到了***的应用。其中PID控制蕴涵动态控制过程中的信息,具有较强的鲁棒性,是交流伺服电机驱动系统中基本的控制方式。为了提高控制效果,往往采用解耦控制和矢量控制技术。在对象模型确定、不变化且是线性的以及操作条件、运行环境是确定不变的条件下,采用传统控制技术是简单有效的。但是在高精度微进给的高性能场合,就必须考虑对象结构与参数的变化。各种非线性的影响,运行环境的改变及环境干扰等时变和不确定因素,才能得到满意的控制效果。因此,现代控制技术在直线伺服电机控制的研究中引起了很大的重视。常用控制方法有:自适应控制、滑模变结构控制、鲁棒控制及智能控制。主要是将模糊逻辑、神经网络与PID、H∞控制等现有的成熟的控制方法相结合,取长补短,以获得更好的控制性能。南京组装线性马达设计