商机详情 -
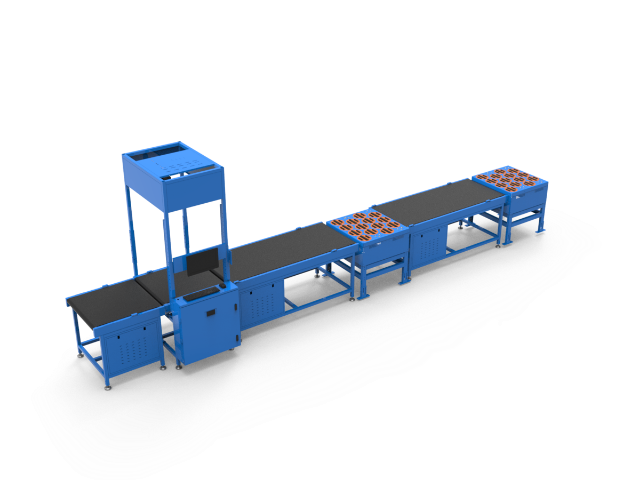
北京仓储DWS+摆轮分拣案例
摆轮分拣系统的参数。摆轮分拣设备的控制系统具有多个重要参数。首先是控制方式,目前主要有PLC(可编程逻辑控制器)控制和计算机集中控制两种方式。PLC控制具有可靠性高、抗干扰能力强的特点,能够实时处理传感器信号并控制摆轮动作;计算机集中控制则更便于进行复杂的算法运算和系统监控,可以实现远程操作和数据分析。控制系统的响应时间也是一个关键参数,一般要求在毫秒级。快速的响应时间能够确保在货物快速通过分拣区域时,及时调整摆轮动作,实现准确分拣。此外,控制系统还具备多种分拣模式,如按目的地分拣、按重量分拣、按尺寸分拣等,可以根据用户的不同需求灵活设置。 摆轮分拣工作原理是什么?北京仓储DWS+摆轮分拣案例
摆轮尺寸与数量摆轮的尺寸和数量会直接影响分拣设备的性能。摆轮尺寸通常根据所要分拣的货物大小和重量来设计,直径一般在50-200毫米之间。较小的摆轮适合分拣小件货物,而较大的摆轮可用于处理大件货物。摆轮数量根据设备的宽度和分拣要求而定,数量较多的摆轮可以提供更均匀的驱动力和更精细的分拣控制。例如,一个较宽的分拣设备可能会有几十甚至上百个摆轮排列成一排,以确保货物在整个宽度范围内都能得到有效的分拣。驱动电机功率 四川瑞格勒DWS+摆轮分拣推荐厂家DWS 系统和摆轮分拣设备如何实现数据传输和系统兼容?
摆轮分拣系统常见的故障。电机故障,电机过载:当分拣的包裹重量超过电机的承载能力,或者电机长时间处于高负荷运转状态时,可能会出现电机过载。电机过载会导致电机发热、电流增大,严重时会烧毁电机。此外,电机的散热不良、电源电压不稳定等因素也可能引发电机过载。电机不转或转速异常:电机不转可能是由于电源故障、电机绕组短路或断路、控制器输出信号异常等原因引起的。电机转速异常(如转速过快或过慢)则可能是由于电机的调速装置故障、负载变化过大或者反馈传感器失灵等因素导致的。传感器故障光电传感器故障:光电传感器用于检测包裹的位置、速度等信息。如果光电传感器的发射端或接收端被灰尘、油污等遮挡,或者光源损坏、光路偏移,就会导致传感器无法正常工作,出现误检测或无信号输出的情况。例如,当光电传感器无法准确检测到包裹进入分拣区域时,摆轮可能无法及时启动分拣动作。称重传感器故障:称重传感器用于测量包裹的重量,其故障可能会导致重量测量不准确。常见的故障原因包括传感器受到冲击、过载、长期受压变形、信号线接触不良等。称重传感器故障会影响分拣系统对包裹重量的判断,进而可能导致错误的分拣决策。控制器故障程序错误或死机:控制器。
DWS+摆轮分拣在图书仓库分拣中的应用:图书出版后会存储在仓库中等待发行。DWS系统可以测量图书包裹(可能是单本图书包装,也可能是多本图书的套装包装)的尺寸和重量,扫描图书的ISBN编码等信息。摆轮分拣设备根据图书的类别(如文学、科技、教育等)、销售渠道(线上电商平台、线下书店等)或者发行区域(不同的城市、书店连锁区域等)进行分拣,方便图书的库存管理和发行配送。退货与库存调整:在图书销售过程中,会有部分图书因为质量问题、销售不佳等原因被退回。DWS+摆轮分拣系统可以重新测量退回图书包裹的信息,将图书分拣到相应的处理区域,如质量检查区、重新包装区或者折价处理区等,有助于合理调整图书库存,减少损失。 摆轮分拣设备的负载能力。
摆轮分拣结构组成。输送装置:这是整个系统的基础部分,负责将待分拣的物品运输到摆轮分拣区域。它一般由动力滚筒或输送带等构成,能够保证物品稳定、匀速地进入分拣环节。摆轮装置:是关键部件,由多个可以控制旋转方向和速度的滚轮组成。这些滚轮通常采用**度的材料制造,以承受一定重量和冲击力的物品。并且滚轮的表面可能会有特殊的涂层或者纹理,增加与物品之间的摩擦力,确保能够有效地改变物品的运动方向。控制系统:通过传感器、PLC等设备来实现。传感器用于检测物品的位置、尺寸、速度等信息,然后将这些数据传输给PLC,PLC根据预设的程序和接收到的数据,精确地控制摆轮的动作,以完成分拣任务。 动态DWS + 摆轮分拣系统在电商物流中的应用。湖北仓储DWS+摆轮分拣供应商
如何选择合适的供应商来提供定制化的DWS+摆轮分拣系统?北京仓储DWS+摆轮分拣案例
DWS+摆轮分拣系统中如何实现分拣功能?精确的摆轮控制,伺服电机驱动:每个摆轮通常由**的伺服电机驱动,控制系统通过向伺服驱动器发送精确的控制信号,实现对摆轮转动角度、速度和方向的精细控制。伺服电机具有高精度、高响应速度和可精确控制的特点,能够在短时间内完成摆轮的转动动作,将物品准确地导向指定的分拣道口。运动控制算法:采用先进的运动控制算法,如PID控制算法、模糊控制算法等,根据传感器反馈的信息和预设的目标值,实时调整伺服电机的输出,使摆轮的运动轨迹更加精细,提高分拣的准确性和效率。例如,在高速分拣过程中,通过实时调整摆轮的转动速度和角度,确保物品能够以比较好的姿态进入分拣道口,避免物品碰撞和堵塞。 北京仓储DWS+摆轮分拣案例