商机详情 -
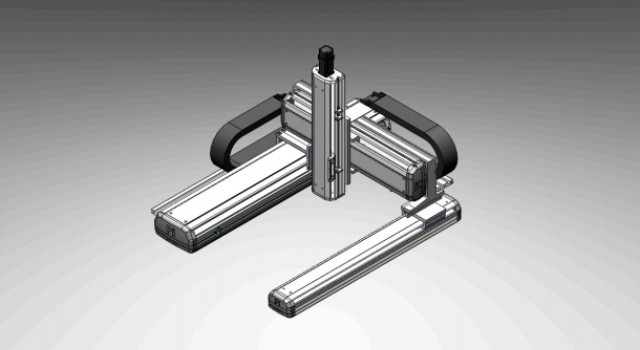
重庆悬臂型重负载直交机械手
直交机械手在电子制造领域的应用:在电子制造行业,直交机械手发挥着不可替代的作用。电子元件的生产和组装对精度要求极高,以手机主板贴片生产为例,直交机械手能够精确地将微小的电子元件,如电阻、电容、芯片等,贴装到印刷电路板(PCB)上。它通过高精度的视觉识别系统,快速准确地定位元件位置,然后利用X、Y、Z轴的协同运动,将元件准确放置在指定焊盘上,确保元件贴装位置误差控制在极小范围内,极大地提高了产品的良品率。在液晶面板生产中,直交机械手负责搬运、切割、检测等多项工作,其高速、稳定的运行特性,满足了电子制造行业对生产效率和产品质量的严格要求,助力电子制造企业实现高效、精密的自动化生产。 直交机械手以准确的坐标移动高时效完成物料搬运,其稳定的运行轨迹与强劲动力令人赞叹!重庆悬臂型重负载直交机械手
直交机械手在食品饮料行业的应用特点:食品饮料行业对生产设备有着特殊的要求,直交机械手在此行业的应用充分考虑了这些特点。在饮料灌装环节,直交机械手控制灌装头的准确定位和上下运动,确保饮料能够准确无误地灌装到瓶中,避免出现溢瓶或灌装不足的情况,极大地提高了灌装效率和产品质量稳定性。在食品包装过程中,机械手负责食品的抓取、包装材料的输送和封口等操作,由于食品生产对卫生条件要求极高,直交机械手通常采用符合食品级标准的材料制作,表面经过特殊处理,不易产生灰尘和微粒,且易于清洁和消毒,满足了食品饮料生产的卫生环境要求,同时其高速、稳定的运行特性也保障了生产的高效性,为食品饮料企业提供了可靠的自动化生产解决方案。 重庆悬臂型重负载直交机械手直交机械手可实现多点定位,位置精确,满足多样需求!
直交机械手的市场发展现状与趋势:当前,直交机械手市场呈现出蓬勃发展的态势。随着全球制造业的复苏以及工业自动化进程的加速,对直交机械手的需求持续增长。从区域市场来看,亚洲地区作为全球制造业的重要基地,对直交机械手的需求量比较大,尤其是中国、日本、韩国等国家,在电子、汽车、机械制造等行业的强劲需求推动下,成为直交机械手市场的主要增长动力。在技术创新和市场竞争的双重驱动下,直交机械手市场呈现出产品多样化、性能高质量化、价格合理化的发展趋势。未来,随着新兴产业的崛起和传统产业的升级改造,直交机械手市场规模有望进一步扩大,市场竞争也将更加激烈,企业需要不断提升技术创新能力和产品质量,以适应市场发展的需求。
直交机械手的驱动系统是其实现高效运动的动力源泉。常见的驱动方式有伺服电机驱动与步进电机驱动。伺服电机驱动凭借其高响应速度、高精度控制以及良好的转矩特性,能够使机械手在高速运行的同时保持准确的定位,适用于对运动精度和速度要求较高的作业场景。步进电机驱动则以其结构简单、成本较低的优势,在一些对精度要求相对不高,但需要实现简单、准确定位的场合得到广泛应用。此外,部分直交机械手还采用气动或液压驱动方式,以满足特定工况下对大负载、高推力的需求,为不同行业的应用提供了多样化的驱动选择。在食品包装行业,直交机械手同样展现出很好的性能。食品包装作业对卫生标准和生产效率要求极高,直交机械手能够在洁净的环境中稳定运行。它可以快速抓取食品,并将其准确放置于包装容器内,实现高效的食品装填。在包装封口环节,机械手可精确控制包装材料的输送与封口动作,确保包装的密封性良好。同时,通过灵活的编程设置,直交机械手能够适应不同规格、形状的食品包装需求,有效提高食品包装的生产效率与包装质量,保障食品在包装过程中的卫生与安全,为食品行业的发展提供有力支持。 保证直交机械手手臂正确方向,抵抗弯曲和扭转力矩,坚固耐用!
直交机械手在自动化生产线中的重要作用:直交机械手是自动化生产线的重要组成部分,它如同生产线的“手臂”,承担着物料搬运、加工操作、质量检测等多项关键任务。在一条完整的自动化生产线上,直交机械手能够按照预设的程序,在不同的工位之间快速、准确地搬运工件,实现生产过程的连续性和高效性。例如,在电子产品的自动化生产线上,机械手将零部件从一个加工工位搬运到另一个加工工位,完成焊接、装配、检测等一系列操作,确保产品在生产过程中的准确定位和快速流转。通过与其他自动化设备,如传感器、输送机、机器人等协同工作,直交机械手使整个自动化生产线形成一个有机的整体,极大地提高了生产效率、产品质量和一致性,降低了生产成本,为企业实现智能化、高效化生产奠定了坚实基础。 直坐标机械手采用强度高结构钢,强度高,振动摇晃全无!重庆悬臂型重负载直交机械手
点胶作业时,直交机械手动作准确,胶点均匀,品质上乘!重庆悬臂型重负载直交机械手
直交机械手的安装与调试是确保其正常运行的重要环节。在安装前,需要对安装现场进行清理和准备,确保安装平台平整、稳固。首先,将机械手的支架按照设计要求安装在工作台上,并进行水平和垂直度调整,保证支架安装牢固。然后,依次安装机械臂、导轨、滑块、驱动装置和传动装置等部件,注意各部件的安装顺序和连接方式,确保安装正确无误。安装完成后,进行电气连接,将控制器、驱动器、传感器等设备的线缆连接好,并检查线路是否存在短路、断路等问题。在调试阶段,首先进行空载试运行,通过控制系统发送简单的运动指令,检查机械手各轴的运动是否平稳、顺畅,传感器反馈是否正常。然后,逐渐增加负载,进行负载试运行,调整控制器的参数,使机械手的运动精度、速度和稳定性达到设计要求。而后,进行实际工作任务的模拟测试,对机械手的性能进行整体评估和优化。 重庆悬臂型重负载直交机械手