商机详情 -
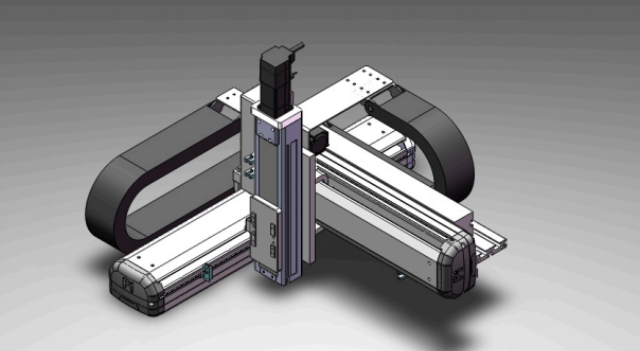
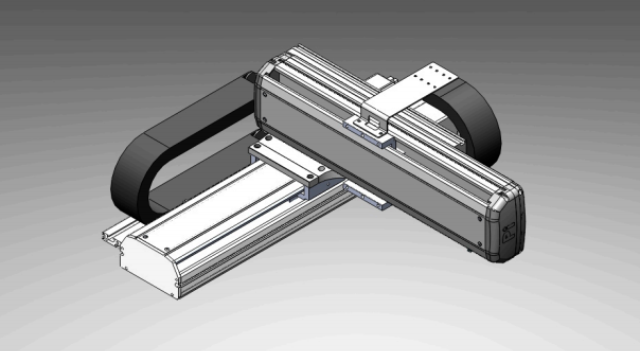
广东螺杆型直交机械手
直交机械手的精度是衡量其性能优劣的重要指标之一。为实现高精度运行,制造商在设计与制造过程中采取了诸多措施。除了选用高精度的传动部件和精密的导轨滑块外,还通过先进的误差补偿技术来进一步提升精度。例如,利用激光干涉仪对各轴的运动误差进行精确测量,然后将测量数据反馈至控制系统,通过软件算法对误差进行补偿修正。此外,在机械结构的设计上,充分考虑热变形、受力变形等因素,采用优化的结构设计和材料选择,降低这些因素对精度的影响,从而使直交机械手能够在长期运行中始终保持极高的定位精度,满足复杂制造领域对高精度作业的严格要求。 联轴结构设计,让直交机械手维护简便,降低成本,岂不妙哉?广东螺杆型直交机械手

在医疗设备制造领域,直交机械手发挥着至关重要的作用。医疗设备的制造对精度和洁净度要求近乎苛刻,直交机械手能够在无尘、无菌的环境中准确作业。在医疗器械的组装过程中,机械手可将微小的零部件准确安装至相应位置,确保医疗器械的性能稳定可靠。例如,在心脏起搏器等精密医疗器械的生产中,直交机械手的高精度操作能够有效避免人工组装可能产生的误差,提高产品质量与安全性。在医疗检测设备中,直交机械手可实现样本的自动抓取与转移,提升检测效率与准确性,为医疗设备制造行业的发展注入强大动力,推动医疗技术不断进步。 天津悬臂型重负载直交机械手堆码任务中,直交机械手有序堆码,整齐稳固,节省空间!
直交机械手的发展趋势与创新方向:随着科技的不断进步,直交机械手正朝着智能化、轻量化、高速化与高精度化的方向发展。在智能化方面,引入人工智能技术,使机械手能够根据生产环境的变化自动调整运动策略,实现自主决策与智能操作。轻量化设计则通过采用新型强度高、低密度材料,在保证机械结构刚性的前提下,降低机械手的整体重量,提高其运动灵活性与能源利用效率。高速化与高精度化的发展趋势,要求不断优化驱动系统与控制算法,提升电机的响应速度与定位精度,满足日益增长的高效、精密生产需求。此外,模块化设计也是未来的创新方向之一,通过将机械手的各个功能模块进行标准化设计,方便用户根据实际需求进行灵活组合与定制,进一步拓展直交机械手的应用领域。
直交机械手与协作机器人的对比与协同应用:直交机械手与协作机器人在工业自动化领域各有特点,二者既存在差异又可协同应用。直交机械手通常具备较高的负载能力与定位精度,适用于大规模、重复性强的工业生产任务,如汽车制造、电子加工等行业的物料搬运与加工操作。而协作机器人则更注重与人的安全协作,其柔性关节与智能传感器能够使其在与人近距离接触时自动降低速度或停止运动,保障人员安全。协作机器人常用于需要人机互动的场景,如产品装配、质量检测等环节。在实际生产中,直交机械手与协作机器人可实现协同作业。例如,在电子产品的生产线上,直交机械手负责将大型零部件搬运至装配区域,协作机器人则在操作人员的协助下完成精细的装配工作,二者优势互补,共同提高生产效率与产品质量,为企业带来更高效、灵活的自动化生产解决方案。 环境适应性强的旋转变压器作为位置检测器,为直交机械手定位保驾护航!
皮带型直交机械手的工作机制:皮带型直交机械手是直交机械手的一种常见类型,其结构设计独具特点。它主要由驱动系统、传动系统、控制系统和工作台组成。驱动系统通常采用电机,为机械手的运动提供动力。传动系统则依靠皮带和皮带轮来传递动力,当电机运转时,带动皮带轮转动,进而使皮带带动机械手的执行部件在导轨上做直线运动。这种传动方式具有结构简单、成本较低、运行平稳等优点。控制系统负责对电机的转速、转向以及运动时间进行精确控制,从而实现机械手在不同位置的精确定位和动作顺序的准确执行。工作台用于承载和固定操作的工件或工具,配合机械手的运动完成物料搬运、装配等任务,在一些对成本敏感且对精度要求适中的生产场景中应用普遍。 检测任务交给直交机械手,准确检测,发现问题,迅速解决!四川三抽直交机械手
Z 轴可机械锁止的直坐标机械手,防止掉落,保障安全!广东螺杆型直交机械手
直交机械手的精度控制技术精度是直交机械手的关键性能指标之一。为实现高精度控制,一方面在机械结构上采用高精度的滚珠丝杆、直线导轨等部件,并严格控制加工精度和装配精度,减少机械间隙带来的误差。另一方面,在控制系统中运用先进的算法和传感器技术。例如,通过高精度的编码器实时监测电机的旋转角度,进而精确计算机械手的位置,当检测到位置偏差时,控制系统迅速做出调整,确保机械手始终按照预设轨迹运动。此外,还可采用误差补偿技术,对机械结构的固有误差以及运行过程中因温度变化、负载变化等因素产生的误差进行补偿,从而进一步提高直交机械手的定位精度,满足对精度要求极高的应用场景,如精密仪器制造、生物医疗设备生产等。 广东螺杆型直交机械手