欢迎来到金站网
金站网首页
网站导航

PROFINET总线,简称PN总线PROFINET 是一种适用于自动化行业的开放式以太网标准,由PROFIBUS国际组织2000年推出,基于工业以太网技术的新一代自动化总线标准。其功能包括:实时通信、分布式现场设备、运动控制、分布式自动化、网络安装、IT标准和信息安全、故障安全和过程自动化这8个主要的模块。
现在我们主要谈谈运动控制,如何通过Profinet控制微纳运控VS500D伺服使旋转电机在EPOS模式下运行。
1.首先在博图软件创建新的项目:
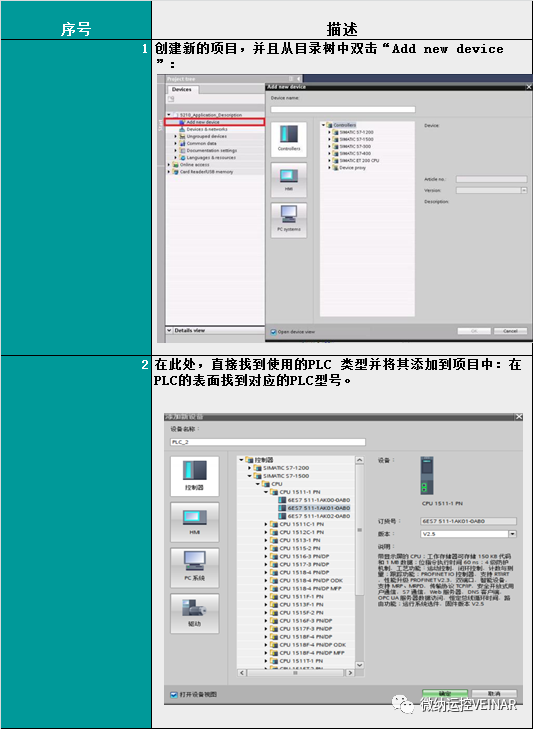
添加VS500D到项目中的步骤如下(GSD文件请联系我们技术人员获取):

(旋转电机的系统参数不同,旋转电机的参数请直接与技术人员联系并获取)
2.下面进行EPOS功能测试
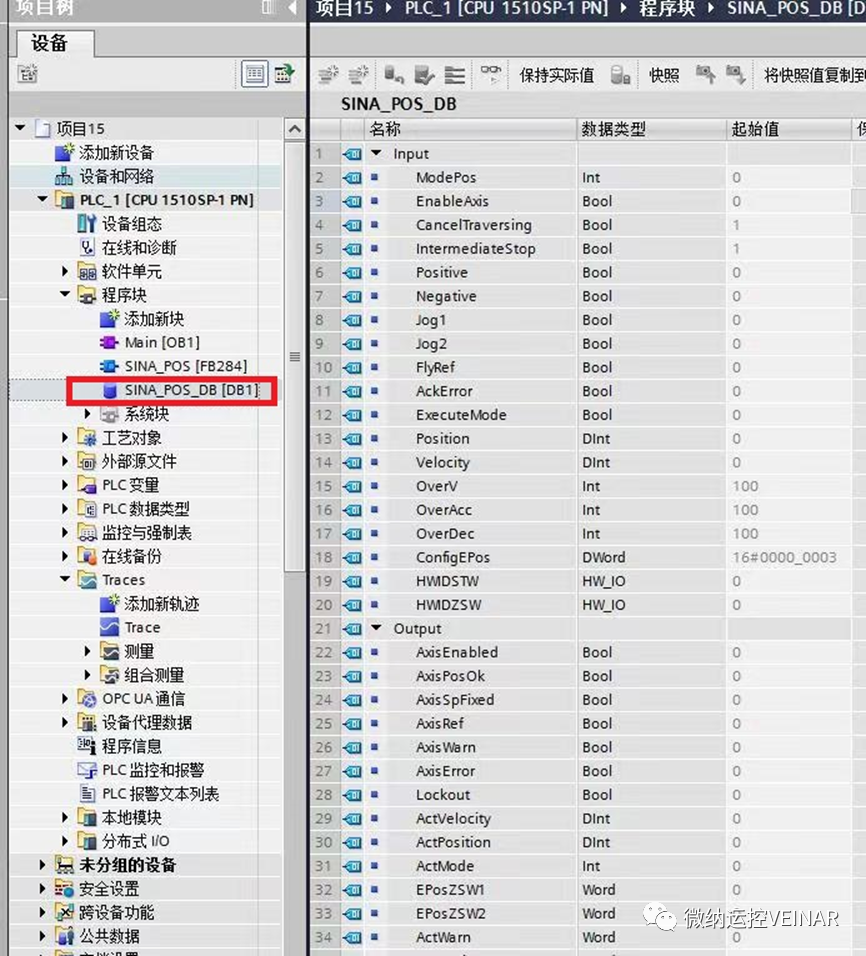
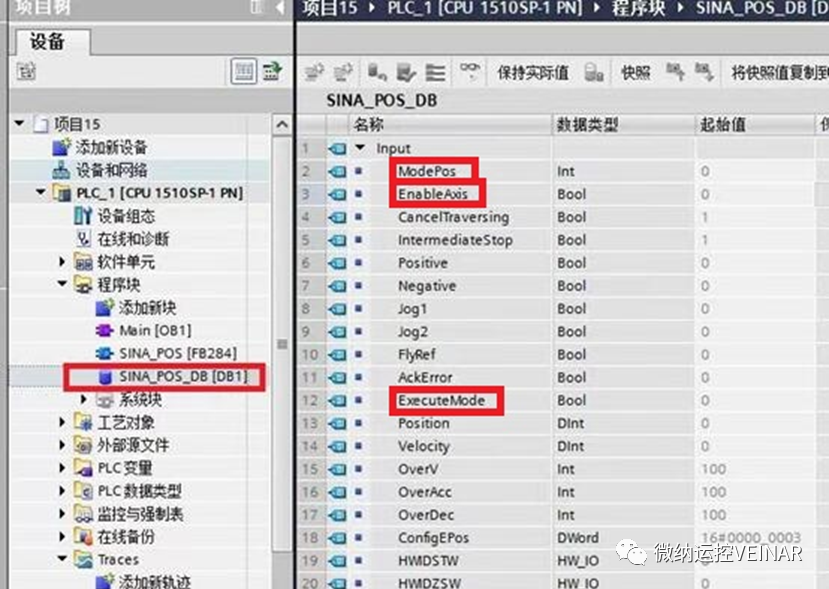
首先在“程序块”中添加SINA_POS(FB284)

在SINA_POS_DB[DB1]中调试参数
在运行之前首先要匹配好如下参数:
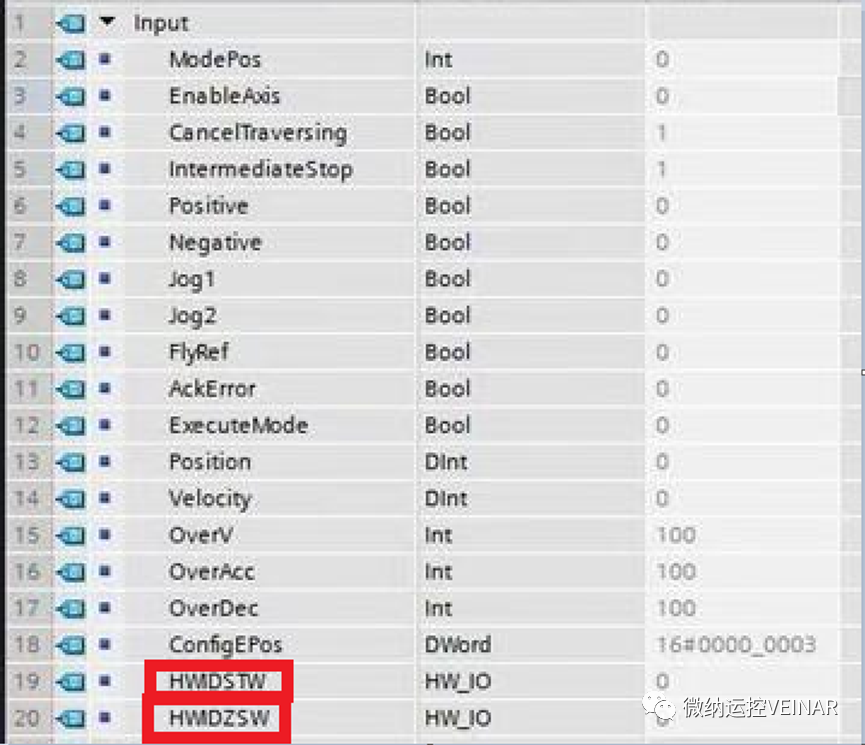
该参数在报文111属性中“系统参数”栏中可以看到“硬件标识符”,“硬件标识符”即为这两个参数的大小;
在添加报文页面,右击“西门子报文111,PZD-1…”;点击“属性”;
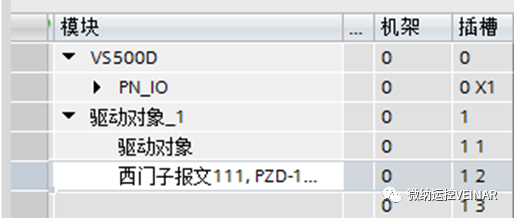
进入如下页面,点击系统参数,找到“硬件标识符”。

将找到的参数如写入“HWIDSTW”和“HWIDZSW"
3.输入说明
ModePos可以设置1-8,此参数用来设定伺服的运动模式
(1)相对运动:设定的位置是相对当前位置移动的距离。
(2)***运动:设定的位置值时相对原点的位置,必须先回原点才能进行***运动。
(3)连续运动:以恒定的速度运行,中途停止则需要中断任务。
(4)主动回零:主动回原点,伺服主动寻找原点且移动到原点位置。
(5)设置零点:把当前位置设为原点,更改当前的伺服位置值。
(6)运行程序段:设定运行的程序段0-15。程序段运行方式可以通过伺服调试软件设置。
(7)点动1:以指定的速度点动,速度可以通过伺服调试软件设置。
(8)点动2:以指定的距离点动,距离可以通过伺服调试软件设置。
详细说明见如下表格:
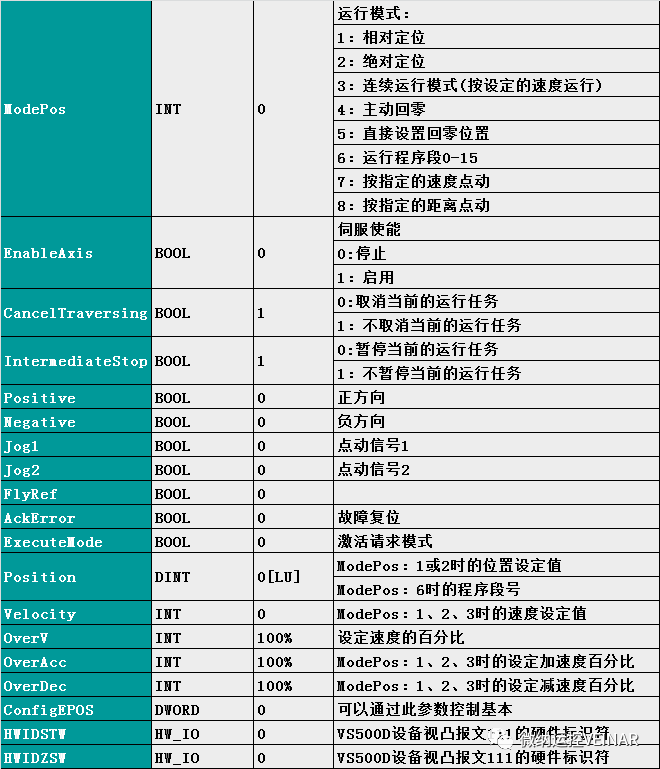
在不同Modepos下的具体操作,及相关参数设置。
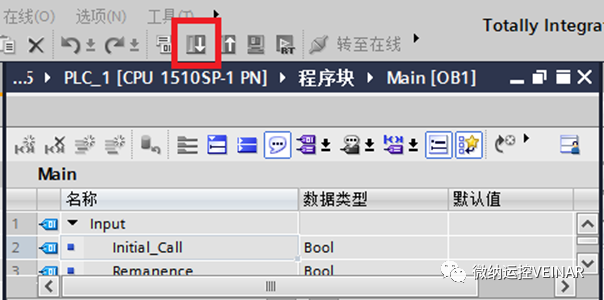
点击“下载到设备”;进入下图页面:
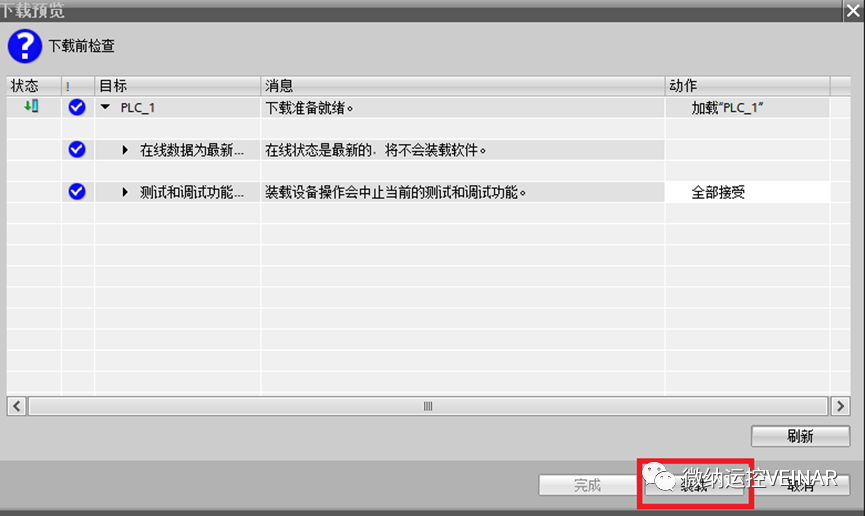
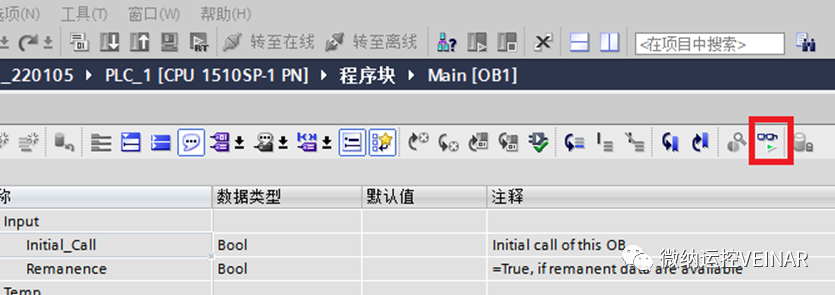
点击“装载”,完成之后,点击“完成”,之后点击“转至在线”:
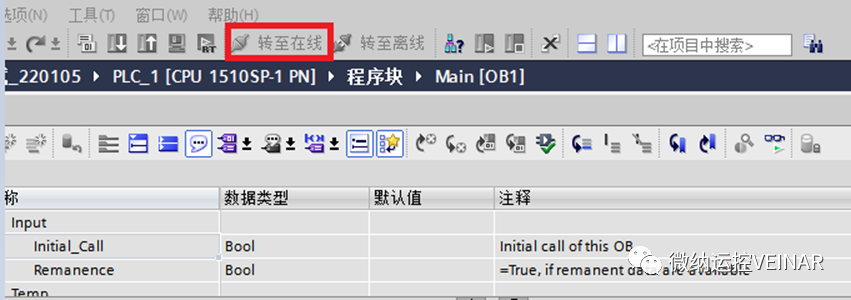
完成转至在线之后,没有出现错误;点击“启用/禁用监视”:
完成如上操作后,进入页面调试界面:
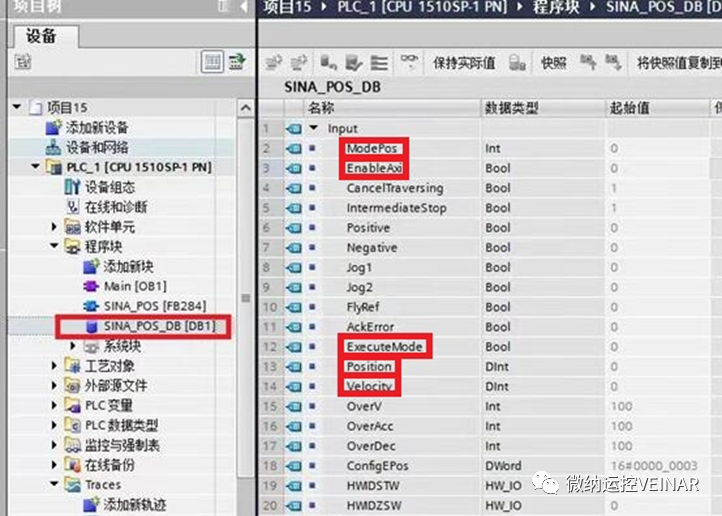
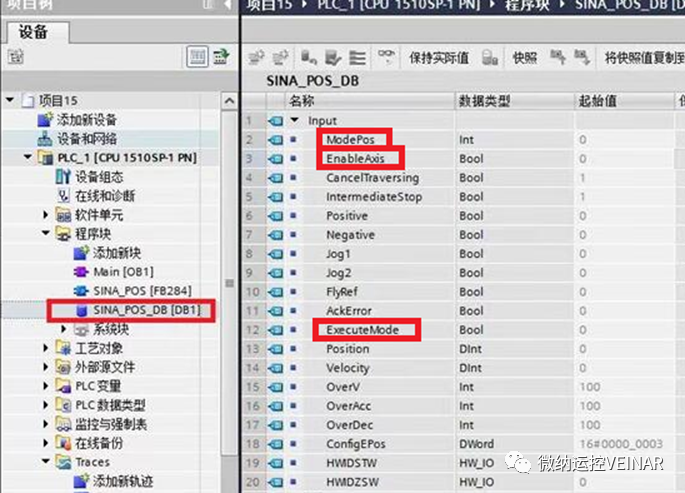
(1) 当ModePos为1时,设置Postion和Velocity值的大小,当位置设为负值时旋转电机朝负向旋转或走,(提示:Velocity的正负与方向无关);设置好位置和速度大小,给ExecuteAxis调整为TURE,给伺服上使能;然后将ExecuteMode***修改为TURE,旋转电机开始行走。
具体需要配置参数如下图所示:
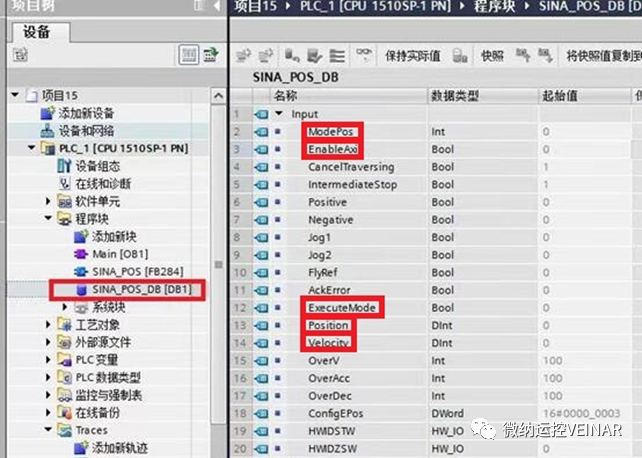
(2)当ModePos为2时,该位置和速度大小仍是Position和Velocity的大小;设置好位置和速度大小,给 ExecuteAxis调整为TURE,给伺服上使能;然后将ExecuteMode***修改为TURE,旋转电机开始行走。
具体需要配置参数如下图所示:
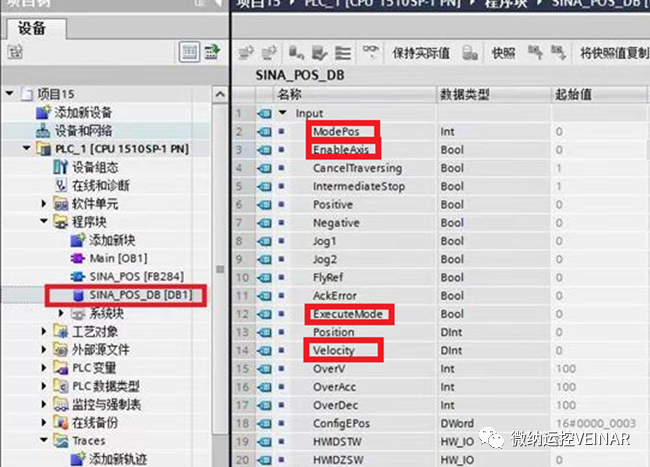
(3) 当ModePos为3时,速度大小是Velocity的大小,设置好Velocity大小;设置好速度大小,给 ExecuteAxis调整为TURE,给伺服上使能;然后将ExecuteMode***修改为TURE,旋转电机开始行走。
具体需要配置参数如下图所示:
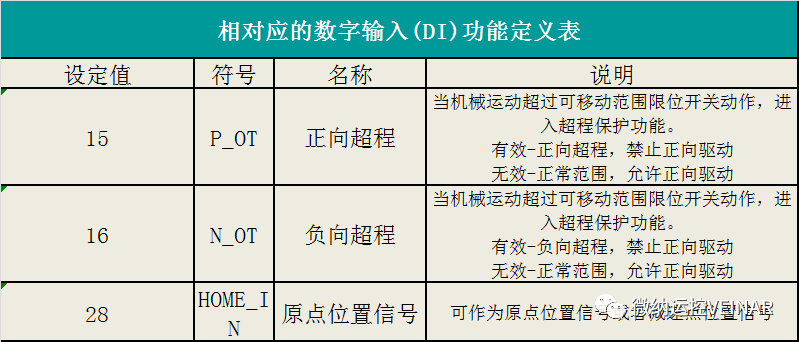
(4) 当ModePos为4时,该功能对应的伺服驱动器的原点回归功能,VS500D拥有35中找原点功能,通过设置F15.22来设置不同的原点回归模式(通过设置F15.23设置原点回归高速速度和F15.25设置原点回归低速速度),通过制动并通过NL(负限位信号)/PL(正限位信号)/HSW(原点位置信号)设置按键来实现不同模式的实现。(具体说明请详见《EPOS原点回归模式介绍》)
具体需要配置参数如下图所示:
(5) 当ModePos为5时,为设置当前原点为原点模式,直接将ExecuteAxis和ExecuteMode调整为TURE,就会把当前所处位置当做原点。
具体需要配置参数如下图所示:
具体观测是否设置0点,可以观测“ActPosition”是否调0来观测。
(6)暂时不支持6号功能模式。
(7)当ModePos为7时,指定速度为点动,直接程序上在“JOG1”上设置不同的速度,ExecuteAxis为TURE时,使“JOG1”或“JOG2”也为TURE,实现点动;“JOG1”或“JOG2”为FALSE时,停止点动。
具体需要配置参数如下图所示:
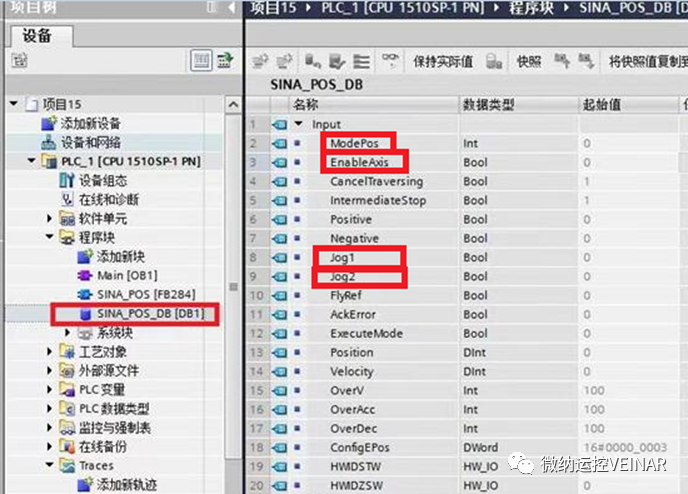
(8) 当ModePos为8时,指定位置点动,直接在伺服上设置位置然后点动, ExecuteAxis为TURE时,使“JOG1”或“JOG2”也为TURE,实现点动;“JOG1”或“JOG2”为0时,停止点动。
具体需要配置参数如下图所示:
