商机详情 -
南京机器人点焊生产线
机器人点焊的工作原理主要基于电流通过金属材料产生热量,从而使金属在焊接点处熔化并结合。具体来说,机器人通过焊接将电流传导到待焊接的金属表面,形成一个局部的高温区域,使金属在此处熔化。焊接的移动和焊接时间由机器人控制系统精确调节,以确保焊接的质量和强度。在焊接过程中,机器人还可以通过传感器实时监测焊接状态,及时调整焊接参数,确保焊接过程的稳定性和可靠性。这种高精度的控制使得机器人点焊在复杂结构和强度高度材料的焊接中表现出色。机器人焊接可实现复杂结构的焊接,满足多样化需求。南京机器人点焊生产线

根据消费者需求进行机器人点焊生产线的设计可以参考以下步骤:设计合理的布局结合生产场地的空间大小和形状,规划生产线的布局,确保物料流动顺畅,减少运输时间和成本。考虑操作人员的工作便利性和安全性,合理安排机器人、工装夹具、焊接电源等设备的位置。定制工装夹具根据产品的形状和尺寸,设计的工装夹具,确保产品在焊接过程中的定位准确、夹紧牢固。工装夹具应易于更换和调整,以适应不同产品的生产需求。配置高效的控制系统选用先进的控制系统,实现对机器人、焊接电源、送丝机构等设备的精确控制和协同运作。开发易于操作和监控的人机界面,方便操作人员进行参数设置、生产调度和故障诊断。扬州流水机器人点焊生产线搭建机器人点焊技术在航空航天领域也得到了广泛应用。
机器人点焊的工作原理主要依赖于电流通过焊接电极产生的热量,将金属工件局部加热至熔融状态,从而实现焊接。具体而言,机器人通过控制焊接电极的压力和电流,精确地将两块金属工件在接触点上进行加热和熔化,形成牢固的焊接接头。机器人系统通常配备有高精度的传感器和控制系统,能够实时监测焊接过程中的温度、压力和时间等参数,确保焊接质量的稳定性。此外,现代机器人点焊系统还可以与其他自动化设备如输送带、视觉系统等进行联动,实现全自动化生产,提高整体生产效率。
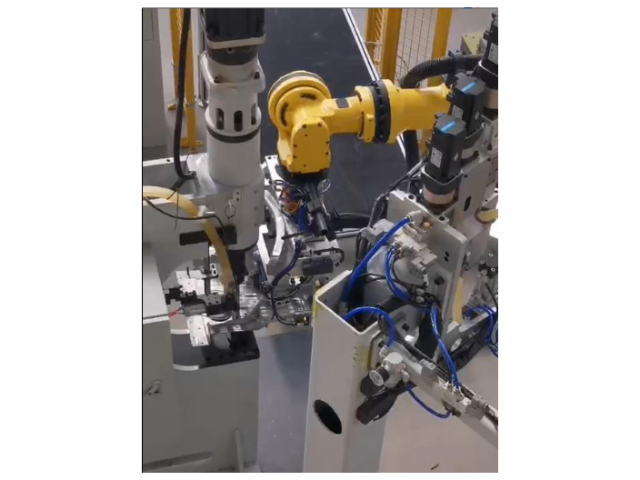
工业机器人是机器人点焊生产线的关键要素。这些机器人通常具有高度的灵活性和精细度。它们的机械臂设计精巧,关节处配备高精度的传感器和驱动器。通过编程,机器人可以准确地定位焊点,无论是复杂形状的焊件还是大面积的焊接工作。例如在汽车车身点焊中,机器人能在狭小的空间内自如地伸展机械臂,到达人工难以触及的焊点位置。而且,机器人能够保持稳定的焊接速度和压力,避免了人工点焊可能出现的因疲劳或操作不一致而导致的质量问题。其可重复性操作能确保每个焊点的质量几乎完全相同,为产品质量的稳定性提供了有力保障。通过视觉系统,机器人能够识别焊接位置,确保精确焊接。

技术优势数字化技术的应用:公司在机器人白车身点焊生产线中广泛应用数字化技术,从前期方案阶段到工艺规划和焊钳选型,均采用先进的数字化工厂软件进行设计和分析,确保生产线的高效运行。高的可靠性:公司自主研发的储能焊接或拉弧焊接设备具有高可靠性和快速提效性,焊接效率达到3-10个/分钟,显著提高了生产效率。改善工人劳动条件:机器人点焊生产线能够在有害环境下长期工作,改善了工人的劳动条件,减轻了操作者的劳动强度。机器人焊接系统可实现多种焊接模式,灵活多变。浙江机器人点焊生产线
生产线的自动化程度高,减少了对人工的依赖。南京机器人点焊生产线
机器人点焊生产线对焊件质量有着积极的影响。其稳定的点焊参数控制,使得每个焊点的大小、强度和外观都高度一致。机器人的高精度定位能力确保了焊点位置的准确性,避免了因焊点偏移而导致的焊件强度不足问题。在焊接过程中,机器人能够精确地控制电极压力,使焊件在点焊过程中保持良好的接触,从而形成高质量的焊点。而且,由于点焊设备参数可以根据焊件的材料和厚度进行精确调整,减少了因焊接参数不合适而产生的虚焊、过焊等缺陷。这种高质量的点焊效果使得焊件在后续的使用过程中更加可靠,提高了产品的整体质量和使用寿命。南京机器人点焊生产线